多视图几何总结——等距变换、相似变换、仿射变换和射影变换
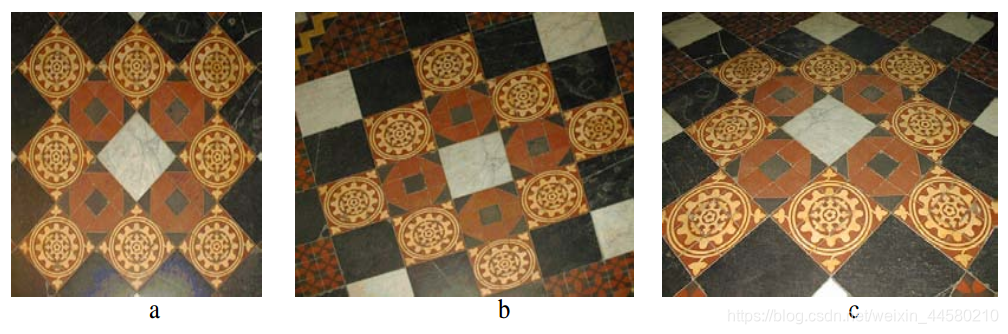 其中图a是相似变换,其效果是圆仍然是圆,正方形仍然是正方形;图b是仿射变换,其效果是圆变成椭圆,垂线不再垂直;图c是射影变换,其效果是平行线变成汇聚线,下面分别从数学层面介绍这几种变换。
其中图a是相似变换,其效果是圆仍然是圆,正方形仍然是正方形;图b是仿射变换,其效果是圆变成椭圆,垂线不再垂直;图c是射影变换,其效果是平行线变成汇聚线,下面分别从数学层面介绍这几种变换。  其中 R R R为旋转矩阵(为正交阵), t t t为平移矢量,在平面等距变换中矩阵一共有三个自由度,旋转一个,平移两个
其中 R R R为旋转矩阵(为正交阵), t t t为平移矢量,在平面等距变换中矩阵一共有三个自由度,旋转一个,平移两个  观察矩阵形式,其实就是在旋转矩阵上加了一个缩放因子s,其一共有四个自由度,因为比等距变换多了一个自由度
观察矩阵形式,其实就是在旋转矩阵上加了一个缩放因子s,其一共有四个自由度,因为比等距变换多了一个自由度  其中A是一个 2 × 2 2×2 2×2的非奇异矩阵,因此仿射变换一共六个自由度,其中比较有意思的是对矩阵 A A A的理解,可以对 A A A进行SVD分解 A = U D V T = ( U V T ) ( V D V T ) = R ( θ ) ( R ( − ϕ ) D R ( ϕ ) ) A=UDV^T=(UV^T)(VDV^T)=R(\theta)(R(-\phi)DR(\phi)) A=UDVT=(UVT)(VDVT)=R(θ)(R(−ϕ)DR(ϕ))因此仿射矩阵可以看成一个旋转 ( ϕ ) (\phi) (ϕ),加上在已旋转的 x x x和 y y y方向分别进行比例因子 λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2(分解出来的特征值或者说矩阵 D D D的对角线元素)分别进行按比例缩放,再加上一个回转 ( − ϕ ) (-\phi) (−ϕ)和最后一个旋转的符合类型 ( θ ) (\theta) (θ),这在我学矩阵论是遇到SVD分解时就思考过的问题,这里解释得很好,可以参考下图理解
其中A是一个 2 × 2 2×2 2×2的非奇异矩阵,因此仿射变换一共六个自由度,其中比较有意思的是对矩阵 A A A的理解,可以对 A A A进行SVD分解 A = U D V T = ( U V T ) ( V D V T ) = R ( θ ) ( R ( − ϕ ) D R ( ϕ ) ) A=UDV^T=(UV^T)(VDV^T)=R(\theta)(R(-\phi)DR(\phi)) A=UDVT=(UVT)(VDVT)=R(θ)(R(−ϕ)DR(ϕ))因此仿射矩阵可以看成一个旋转 ( ϕ ) (\phi) (ϕ),加上在已旋转的 x x x和 y y y方向分别进行比例因子 λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2(分解出来的特征值或者说矩阵 D D D的对角线元素)分别进行按比例缩放,再加上一个回转 ( − ϕ ) (-\phi) (−ϕ)和最后一个旋转的符合类型 ( θ ) (\theta) (θ),这在我学矩阵论是遇到SVD分解时就思考过的问题,这里解释得很好,可以参考下图理解  其不变量为:平行线段的长度比,平行线和面积比(所有面积都缩放 λ 1 λ 2 \lambda_1 \lambda_2 λ1λ2倍)
其不变量为:平行线段的长度比,平行线和面积比(所有面积都缩放 λ 1 λ 2 \lambda_1 \lambda_2 λ1λ2倍)  仿射变换是非齐次坐标的一般非奇异线性变换和一个平移的符合,其一共具有八个自由度
仿射变换是非齐次坐标的一般非奇异线性变换和一个平移的符合,其一共具有八个自由度  射影变换
射影变换  其中 ( x 1 , x 2 . 0 ) T (x_1,x_2.0)^T (x1,x2.0)T是无穷远点(无穷远点的表示方法就是其次坐标最后一位为0),可以发现通过仿射变换无穷远点还是无穷远点,但是通过射影变换可以将无穷远点变换为有限点,正因为如此,射影变换可以完成消除透视失真操作:
其中 ( x 1 , x 2 . 0 ) T (x_1,x_2.0)^T (x1,x2.0)T是无穷远点(无穷远点的表示方法就是其次坐标最后一位为0),可以发现通过仿射变换无穷远点还是无穷远点,但是通过射影变换可以将无穷远点变换为有限点,正因为如此,射影变换可以完成消除透视失真操作:  最后铺上一张多视图几何中关于几种变换的总结表:
最后铺上一张多视图几何中关于几种变换的总结表:  有问题欢迎交流指正~
有问题欢迎交流指正~
发布日期:2021-05-08 21:09:24
浏览次数:17
分类:精选文章
本文共 1361 字,大约阅读时间需要 4 分钟。
多视图几何总结——等距变换、相似变换、仿射变换和射影变换
多视图几何总结——等距变换、相似变换、仿射变换和射影变换
多视图几何再2.4节中介绍好几种变换,有时候容易绕懵,这里花点时间简单总结下
首先只管感受下这几种变换 其中图a是相似变换,其效果是圆仍然是圆,正方形仍然是正方形;图b是仿射变换,其效果是圆变成椭圆,垂线不再垂直;图c是射影变换,其效果是平行线变成汇聚线,下面分别从数学层面介绍这几种变换。 等距变换

其中 R R R为旋转矩阵(为正交阵), t t t为平移矢量,在平面等距变换中矩阵一共有三个自由度,旋转一个,平移两个 其变换不变量是:长度、角度和面积
相似变化

观察矩阵形式,其实就是在旋转矩阵上加了一个缩放因子s,其一共有四个自由度,因为比等距变换多了一个自由度 其不变量为:长度的比率、角度和面积的比率
仿射变换

其中A是一个 2 × 2 2×2 2×2的非奇异矩阵,因此仿射变换一共六个自由度,其中比较有意思的是对矩阵 A A A的理解,可以对 A A A进行SVD分解 A = U D V T = ( U V T ) ( V D V T ) = R ( θ ) ( R ( − ϕ ) D R ( ϕ ) ) A=UDV^T=(UV^T)(VDV^T)=R(\theta)(R(-\phi)DR(\phi)) A=UDVT=(UVT)(VDVT)=R(θ)(R(−ϕ)DR(ϕ))因此仿射矩阵可以看成一个旋转 ( ϕ ) (\phi) (ϕ),加上在已旋转的 x x x和 y y y方向分别进行比例因子 λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2(分解出来的特征值或者说矩阵 D D D的对角线元素)分别进行按比例缩放,再加上一个回转 ( − ϕ ) (-\phi) (−ϕ)和最后一个旋转的符合类型 ( θ ) (\theta) (θ),这在我学矩阵论是遇到SVD分解时就思考过的问题,这里解释得很好,可以参考下图理解 其不变量为:平行线段的长度比,平行线和面积比(所有面积都缩放 λ 1 λ 2 \lambda_1 \lambda_2 λ1λ2倍) 补充:
仿射变换是保持无穷远线不变形的最一般的线性变换,这句话的意思就是说,例如射影变换是会将无穷远点变成有限点,因此原本平行的直线不再平行,而仿射变换之后平行直线仍然平行,因为其不改变无穷远点的性质射影变换

仿射变换是非齐次坐标的一般非奇异线性变换和一个平移的符合,其一共具有八个自由度 其不变量为:共点,共线,接触的阶还有长度的比率的比率
总结
这里可以注意下仿射变换和射影变换的区别如下:
仿射变换 射影变换 其中 ( x 1 , x 2 . 0 ) T (x_1,x_2.0)^T (x1,x2.0)T是无穷远点(无穷远点的表示方法就是其次坐标最后一位为0),可以发现通过仿射变换无穷远点还是无穷远点,但是通过射影变换可以将无穷远点变换为有限点,正因为如此,射影变换可以完成消除透视失真操作: 最后铺上一张多视图几何中关于几种变换的总结表: 有问题欢迎交流指正~ 发表评论
最新留言
留言是一种美德,欢迎回访!
[***.207.175.100]2025年04月12日 08时10分00秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
882. Reachable Nodes In Subdivided Graph
2021-05-09
402. Remove K Digits
2021-05-09
375. Guess Number Higher or Lower II
2021-05-09
650. 2 Keys Keyboard
2021-05-09
764. Largest Plus Sign
2021-05-09
214. Shortest Palindrome
2021-05-09
916. Word Subsets
2021-05-09
869. Reordered Power of 2
2021-05-09
1086 Tree Traversals Again
2021-05-09
1127 ZigZagging on a Tree
2021-05-09
1062 Talent and Virtue
2021-05-09
1045 Favorite Color Stripe
2021-05-09
B. Spreadsheets(进制转换,数学)
2021-05-09
等和的分隔子集(DP)
2021-05-09
基础练习 十六进制转八进制(模拟)
2021-05-09
L - Large Division (大数, 同余)
2021-05-09
39. Combination Sum
2021-05-09
41. First Missing Positive
2021-05-09
80. Remove Duplicates from Sorted Array II
2021-05-09
83. Remove Duplicates from Sorted List
2021-05-09
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 459584149 位访客
访问时间: 2025-04-19 21:36:24
访问IP: 18.117.121.244
Copyright © 2020 - 2025 css8.cn 京ICP备2021015314号-1
手机版