ROS学习过程中的错误记录3 - 回调函数易出现的错误(C++)
 w t f , , , , 祥 哥 表 示 一 脸 懵 逼 , 我 明 明 是 写 了 回 调 函 数 的 啊 ? ! ? ! ? ! wtf,,,,祥哥表示一脸懵逼,我明明是写了回调函数的啊 ? ! ? ! ? ! wtf,,,,祥哥表示一脸懵逼,我明明是写了回调函数的啊?!?!?!
w t f , , , , 祥 哥 表 示 一 脸 懵 逼 , 我 明 明 是 写 了 回 调 函 数 的 啊 ? ! ? ! ? ! wtf,,,,祥哥表示一脸懵逼,我明明是写了回调函数的啊 ? ! ? ! ? ! wtf,,,,祥哥表示一脸懵逼,我明明是写了回调函数的啊?!?!?! 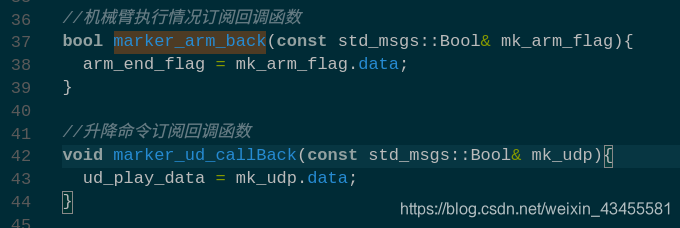 回 调 函 数 的 类 型 手 残 写 成 了 b o o l 型 , 而 人 家 明 明 没 有 返 回 值 , 难 怪 编 译 器 找 不 到 它 0.0 回调函数的类型手残写成了bool型,而人家明明没有返回值,难怪编译器找不到它0.0 回调函数的类型手残写成了bool型,而人家明明没有返回值,难怪编译器找不到它0.0
回 调 函 数 的 类 型 手 残 写 成 了 b o o l 型 , 而 人 家 明 明 没 有 返 回 值 , 难 怪 编 译 器 找 不 到 它 0.0 回调函数的类型手残写成了bool型,而人家明明没有返回值,难怪编译器找不到它0.0 回调函数的类型手残写成了bool型,而人家明明没有返回值,难怪编译器找不到它0.0 
发布日期:2021-07-01 04:03:53
浏览次数:3
分类:技术文章
本文共 1132 字,大约阅读时间需要 3 分钟。
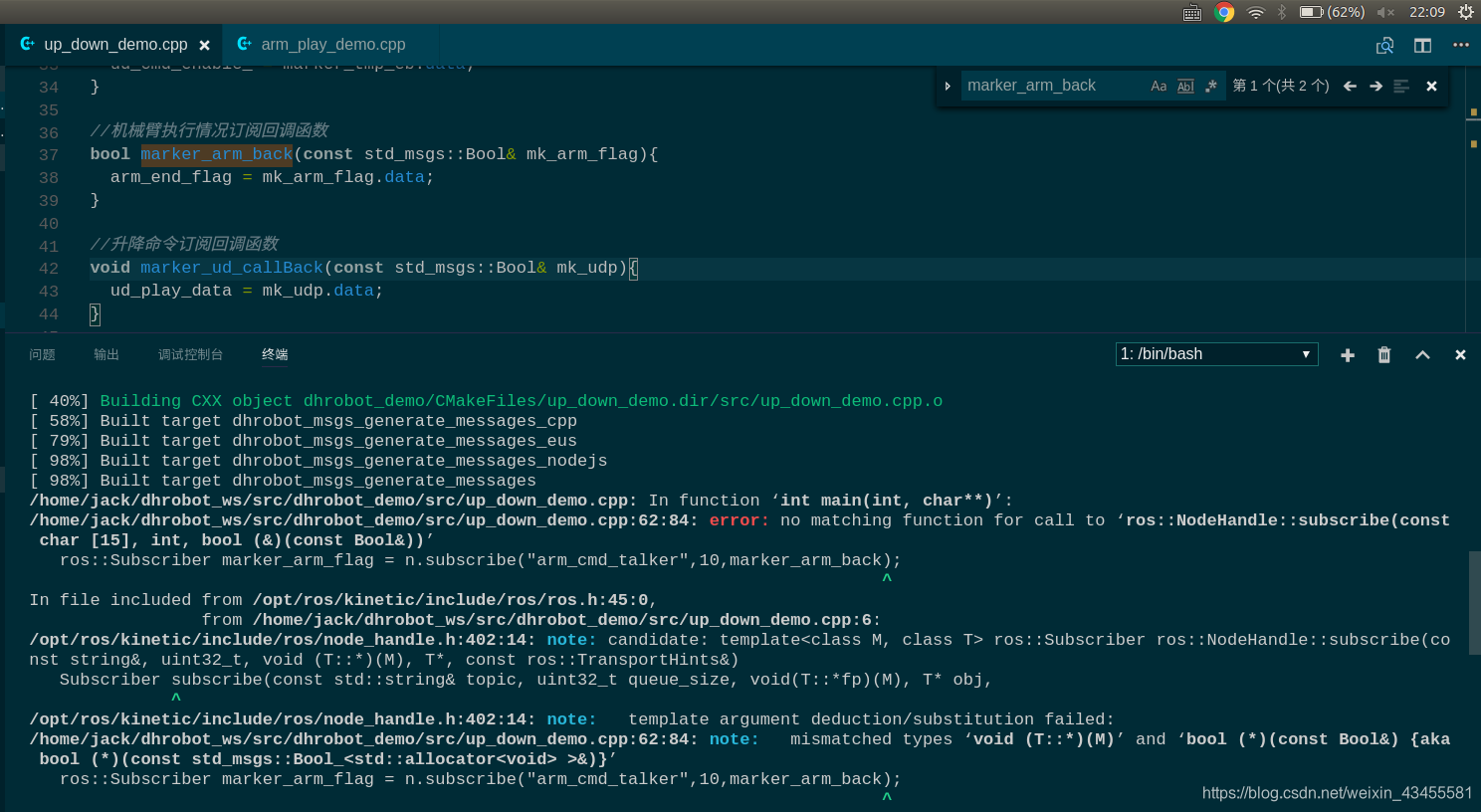
编译过程中出现如下错误:
/home/jack/dhrobot_ws/src/dhrobot_demo/src/up_down_demo.cpp:62:84: error: no matching function for call to ‘ros::NodeHandle::subscribe(const
char [15], int, bool (&)(const Bool&))’ ros::Subscriber marker_arm_flag = n.subscribe(“arm_cmd_talker”,10,marker_arm_back); ^ w t f , , , , 祥 哥 表 示 一 脸 懵 逼 , 我 明 明 是 写 了 回 调 函 数 的 啊 ? ! ? ! ? ! wtf,,,,祥哥表示一脸懵逼,我明明是写了回调函数的啊 ? ! ? ! ? ! wtf,,,,祥哥表示一脸懵逼,我明明是写了回调函数的啊?!?!?! 赶 紧 把 c o d e f a t h e r 简 鸡 蛋 同 志 叫 过 来 看 了 一 眼 , 大 佬 不 愧 是 大 佬 , 一 语 惊 醒 梦 中 人 ! ! ! 赶紧把code father简鸡蛋同志叫过来看了一眼,大佬不愧是大佬,一语惊醒梦中人!!! 赶紧把codefather简鸡蛋同志叫过来看了一眼,大佬不愧是大佬,一语惊醒梦中人!!!
回 调 函 数 的 类 型 手 残 写 成 了 b o o l 型 , 而 人 家 明 明 没 有 返 回 值 , 难 怪 编 译 器 找 不 到 它 0.0 回调函数的类型手残写成了bool型,而人家明明没有返回值,难怪编译器找不到它0.0 回调函数的类型手残写成了bool型,而人家明明没有返回值,难怪编译器找不到它0.0 
总结:
- 小白总是手高眼低,遇到错误要先冷静分析一下
- 遇到的问题要及时记录,防止后续重复遇到此问题
- 细节一定要注意,修改完程序及时备份与保存
- 编译时要注意是否成功对你要编译的程序进行了编译
- 如果指定一个功能包进行编译,再编译整个工作过程时会出现重复编译之前指定的功能包的情况(而不是编译整个工作空间),因此要使用
catkin_make -DCATKIN_WHITELIST_PACKAGES=''命令进行编译
转载地址:https://miracle.blog.csdn.net/article/details/90523967 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
做的很好,不错不错
[***.243.131.199]2024年04月23日 20时46分41秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
秋招总结(一)-C++归纳
2019-05-01
秋招总结(三)-操作系统归纳
2019-05-01
带缓冲I/O 和不带缓冲I/O的区别与联系
2019-05-01
LINUX CP命令详解
2019-05-01
source insight快捷键及使用技巧
2019-05-01
映 射 ALT 键
2019-05-01
vim使用快捷键F4生成文件头注释、F5生成main函数模板、F6生成.h文件框架模板
2019-05-01
用python解析html
2019-05-01
OV5620的视频驱动
2019-05-01
C++中两个类交叉定义或递归定义的解决办法
2019-05-01
ECharts is not Loaded解决方案
2019-05-01
ECharts地图显示不完整,只显示南海诸岛问题
2019-05-01
echarts切换tab时,第一个图表显示,第二个图表不显示的解决办法
2019-05-01
记一次Hive 行转列 引起的GC overhead limit exceeded
2019-05-01
OpenGL ES八 - 交叉存取顶点数据
2019-05-01
crontab定时任务写法
2019-05-01
nginx: [emerg] unknown directive "if($remote_addr" in /usr/local/tools/nginx/conf/nginx.conf:57
2019-05-01
module pip has no attribute main问题解决
2019-05-01
LeetCode 134.Gas Station (加油站)
2019-05-01
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311735268 位访客
访问时间: 2024-05-07 15:15:29
访问IP: 18.220.140.5
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版