从伺服系统来看如何提升机器人的轨迹精度 公开课笔记
发布日期:2021-07-01 04:03:43
浏览次数:3
分类:技术文章
本文共 45 字,大约阅读时间需要 1 分钟。
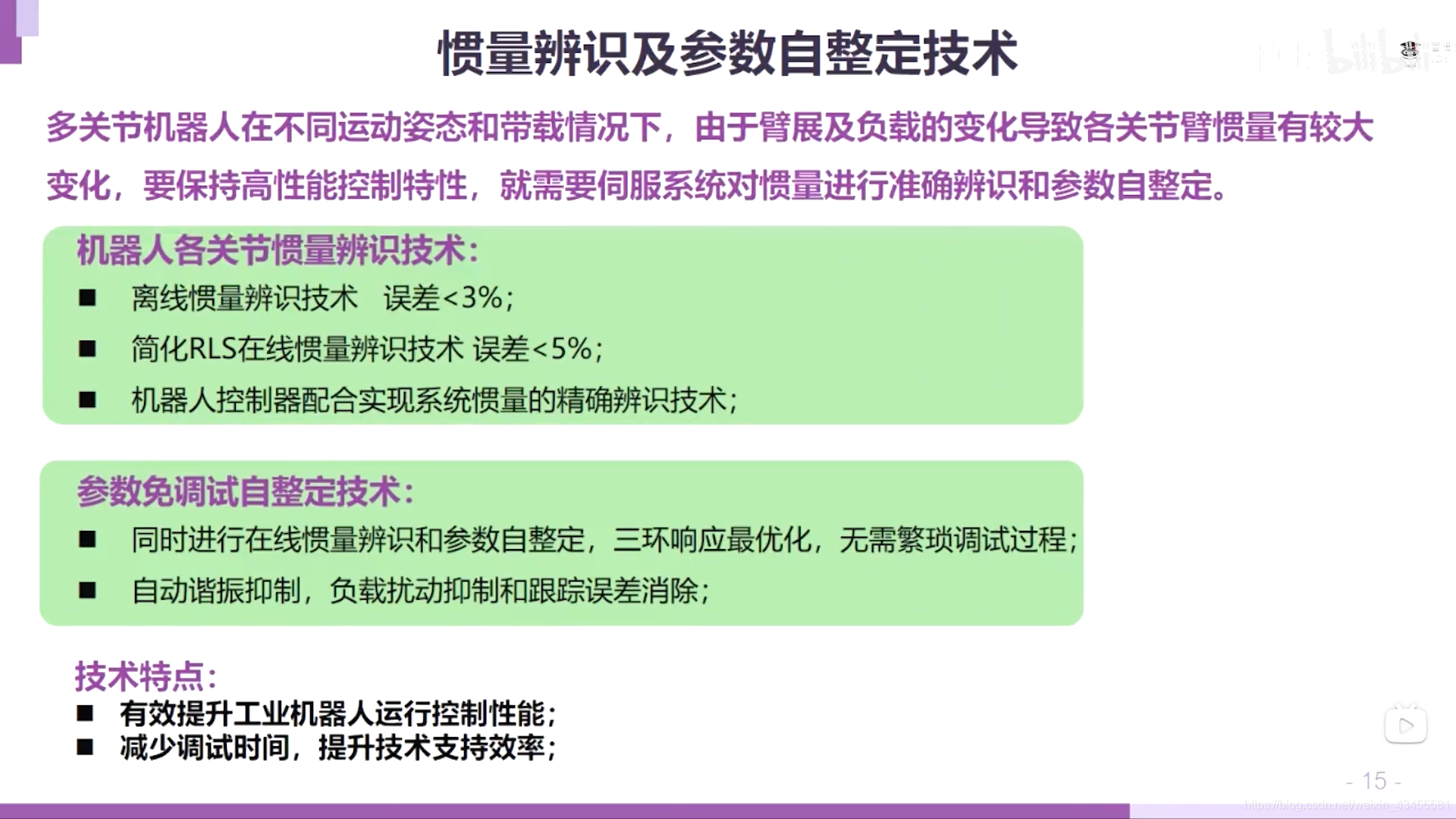
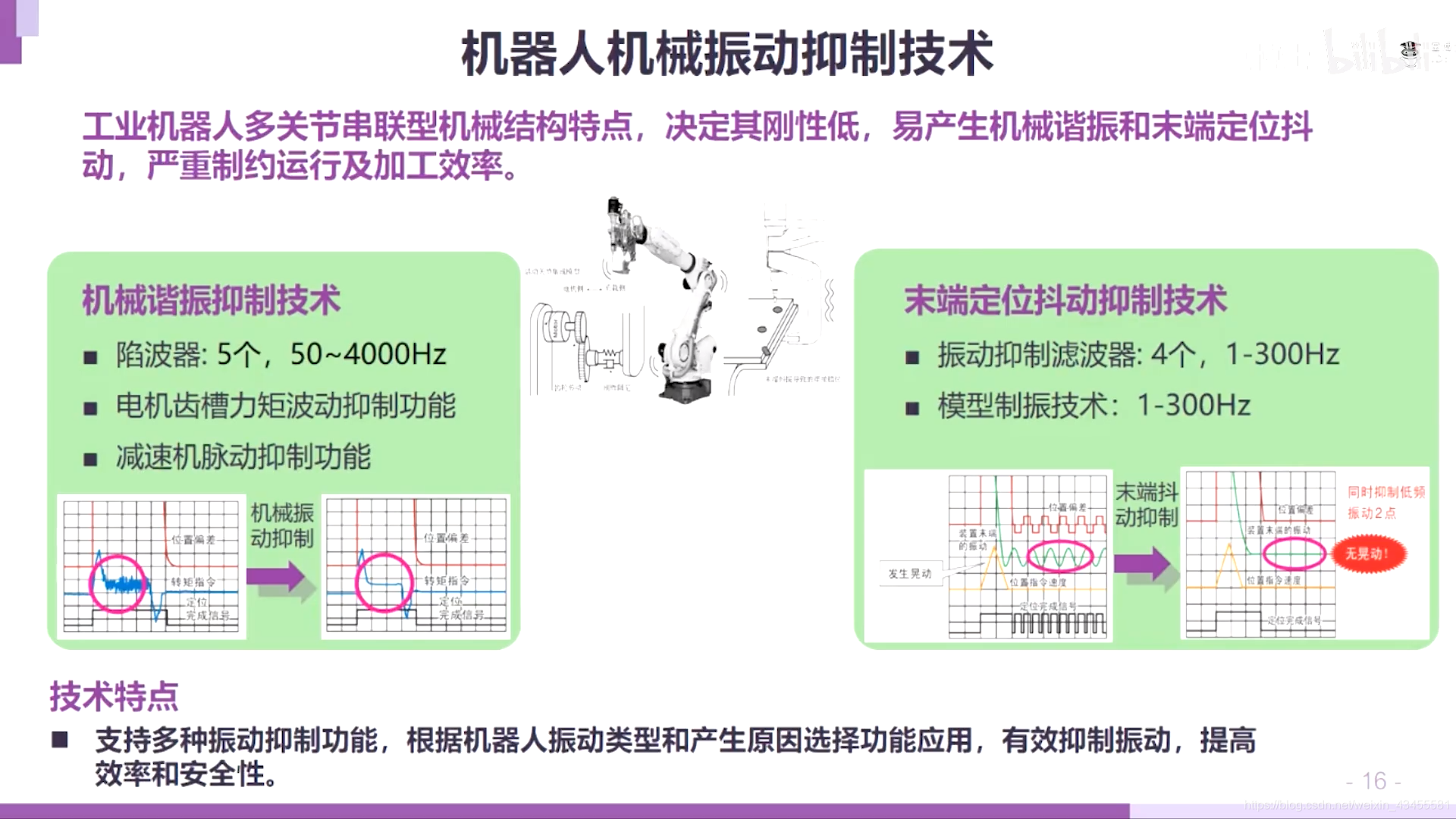
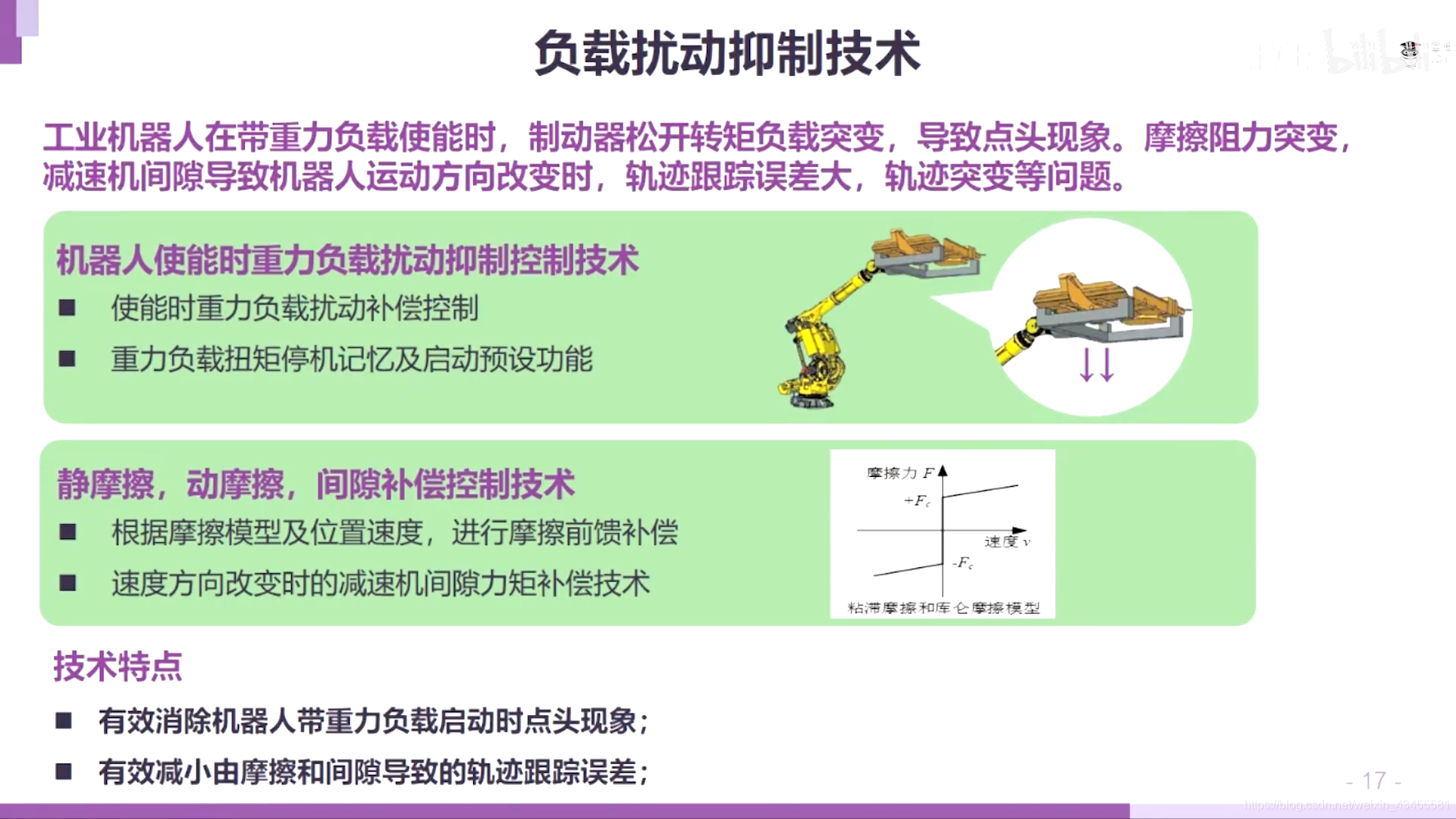
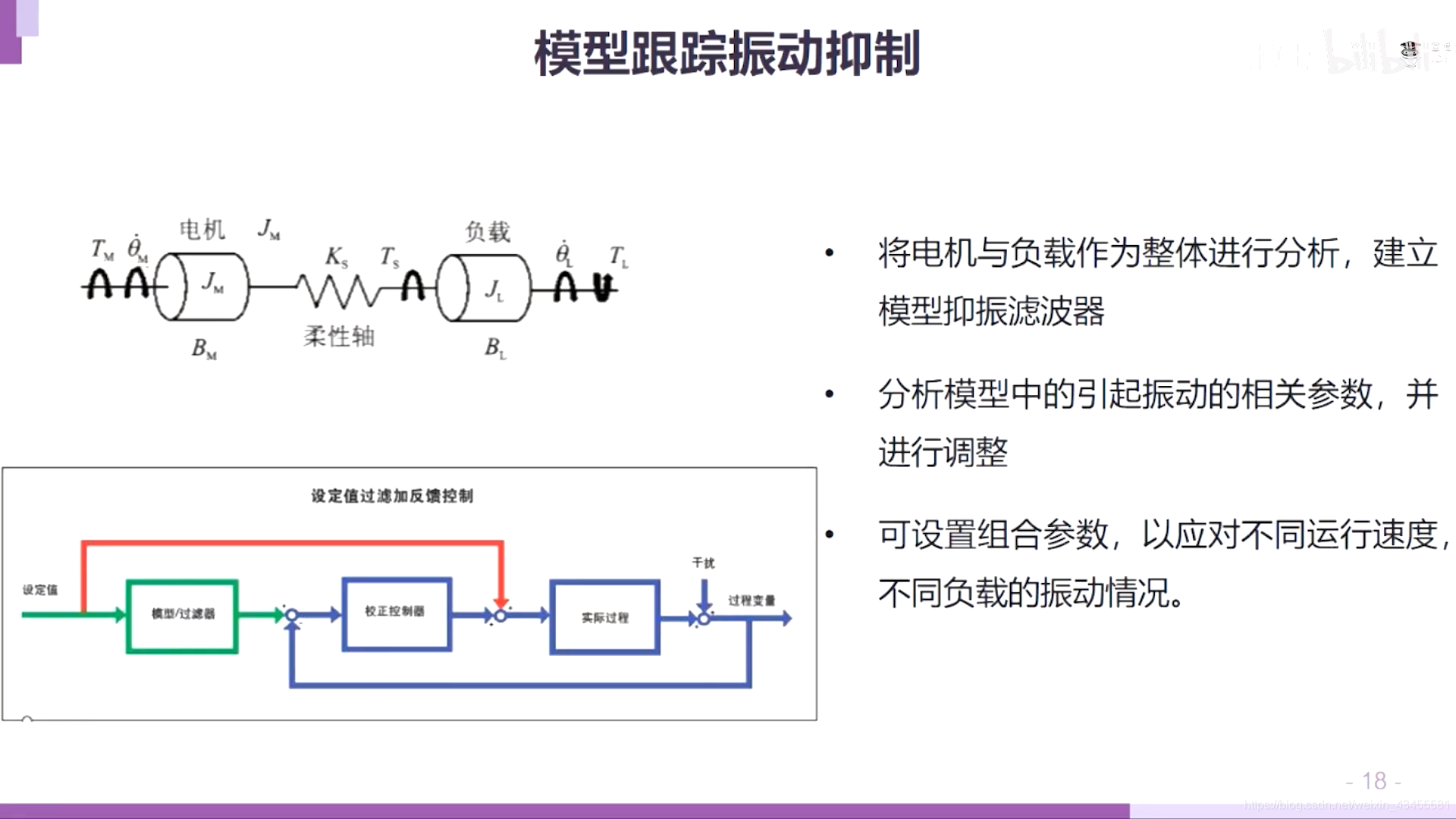
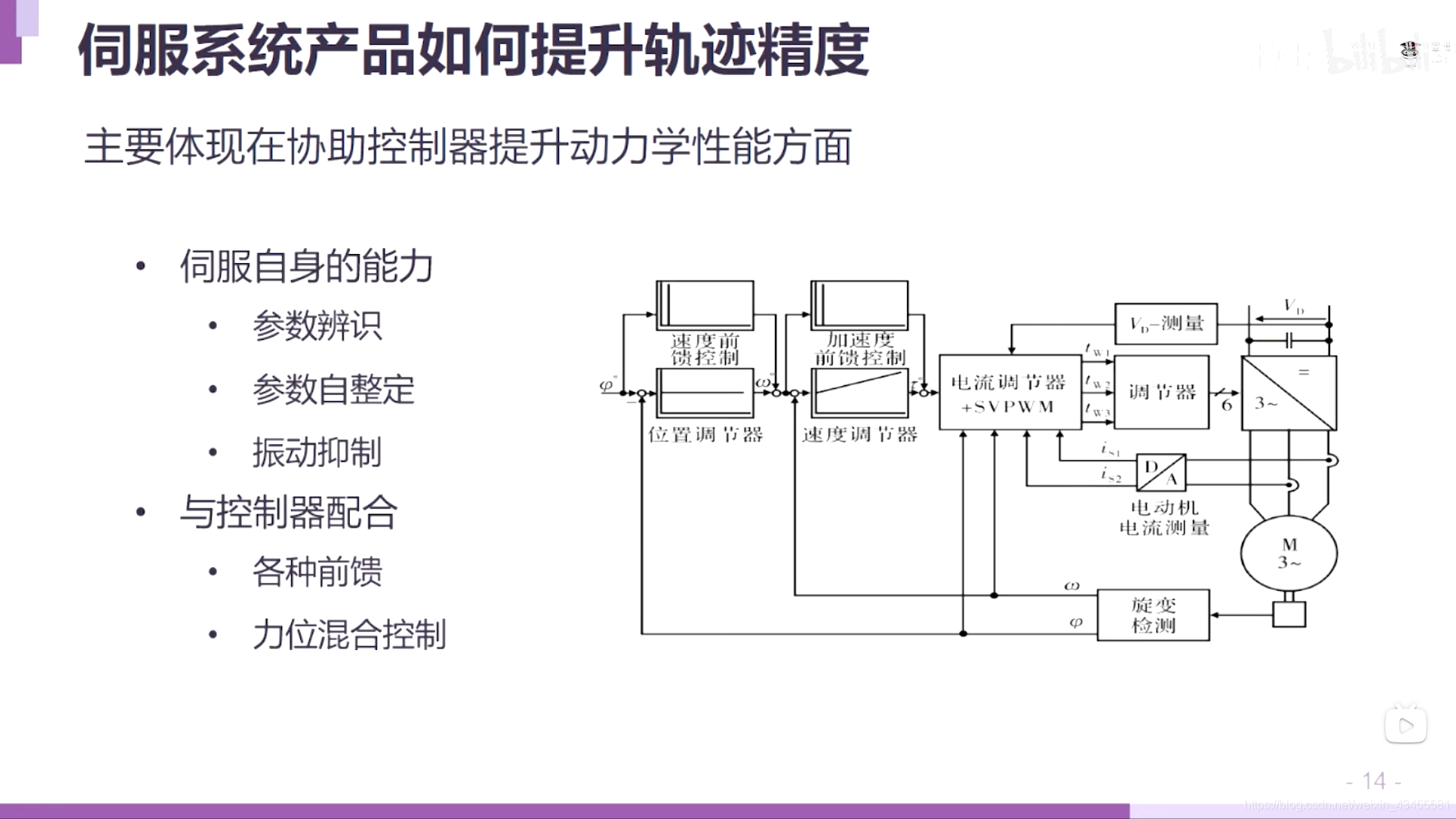
声明:本文所有图片均截自bilibili堂博士UP上传的公开课,仅作为个人笔记记录,侵删~
转载地址:https://miracle.blog.csdn.net/article/details/116537546 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
逛到本站,mark一下
[***.202.152.39]2024年04月21日 06时31分12秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
ImageView scaleType
2021-07-04
字符串的排序
2021-07-04
内存分配(mallloc,calloc,realloc,new)
2021-07-04
使用 Minidumps 和 Visual Studio .NET 进行崩溃后调试
2021-07-04
struts返回xml数据例子
2021-07-04
内存对齐详解
2021-07-04
秋招总结(一)-C++归纳
2021-07-04
秋招总结(三)-操作系统归纳
2021-07-04
带缓冲I/O 和不带缓冲I/O的区别与联系
2021-07-04
LINUX CP命令详解
2021-07-04
source insight快捷键及使用技巧
2021-07-04
映 射 ALT 键
2021-07-04
vim使用快捷键F4生成文件头注释、F5生成main函数模板、F6生成.h文件框架模板
2021-07-04
用python解析html
2021-07-04
OV5620的视频驱动
2021-07-04
C++中两个类交叉定义或递归定义的解决办法
2021-07-04
ECharts is not Loaded解决方案
2021-07-04
echarts切换tab时,第一个图表显示,第二个图表不显示的解决办法
2021-07-04
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311873223 位访客
访问时间: 2024-05-08 02:26:24
访问IP: 3.144.238.20
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版