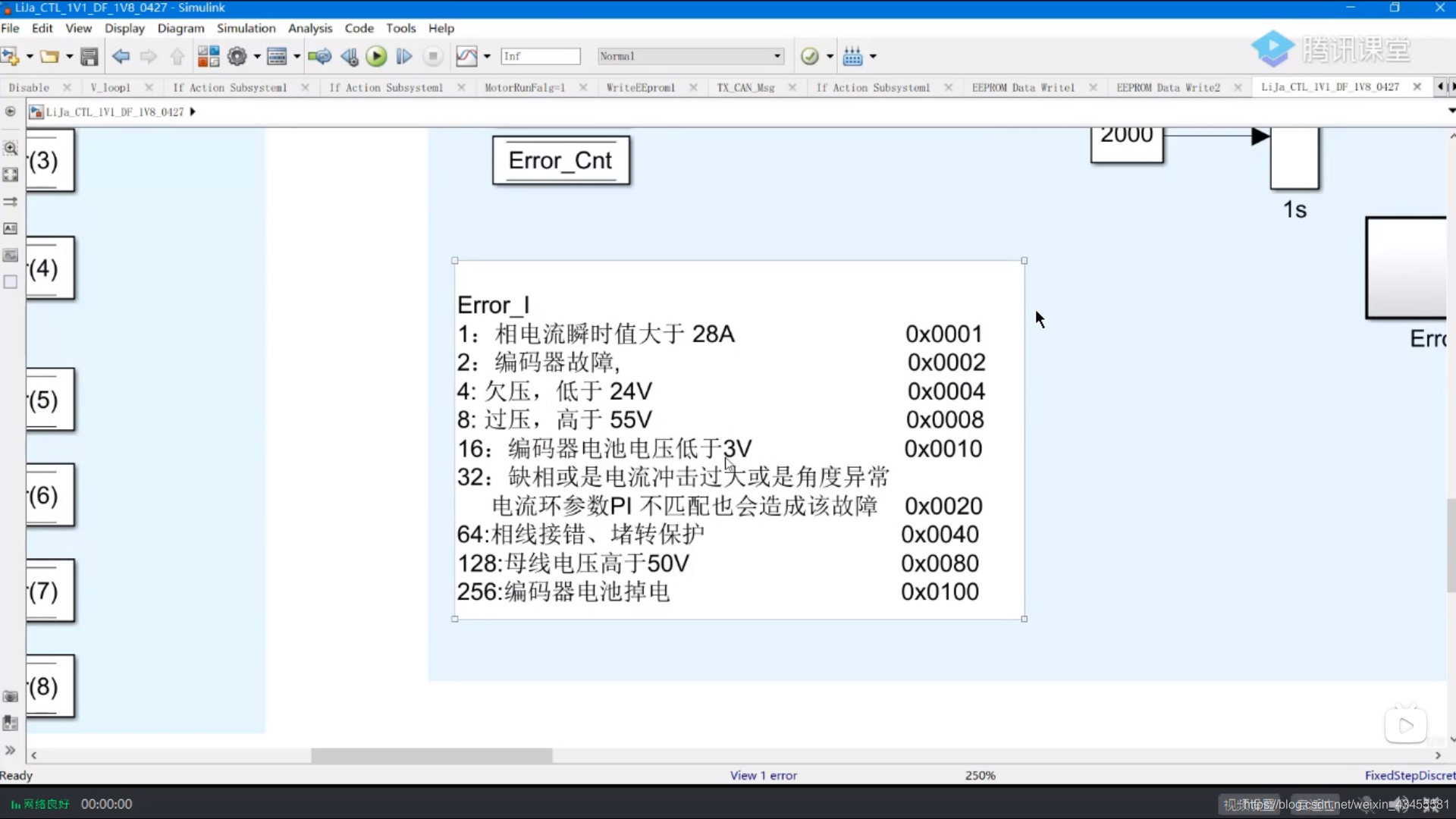
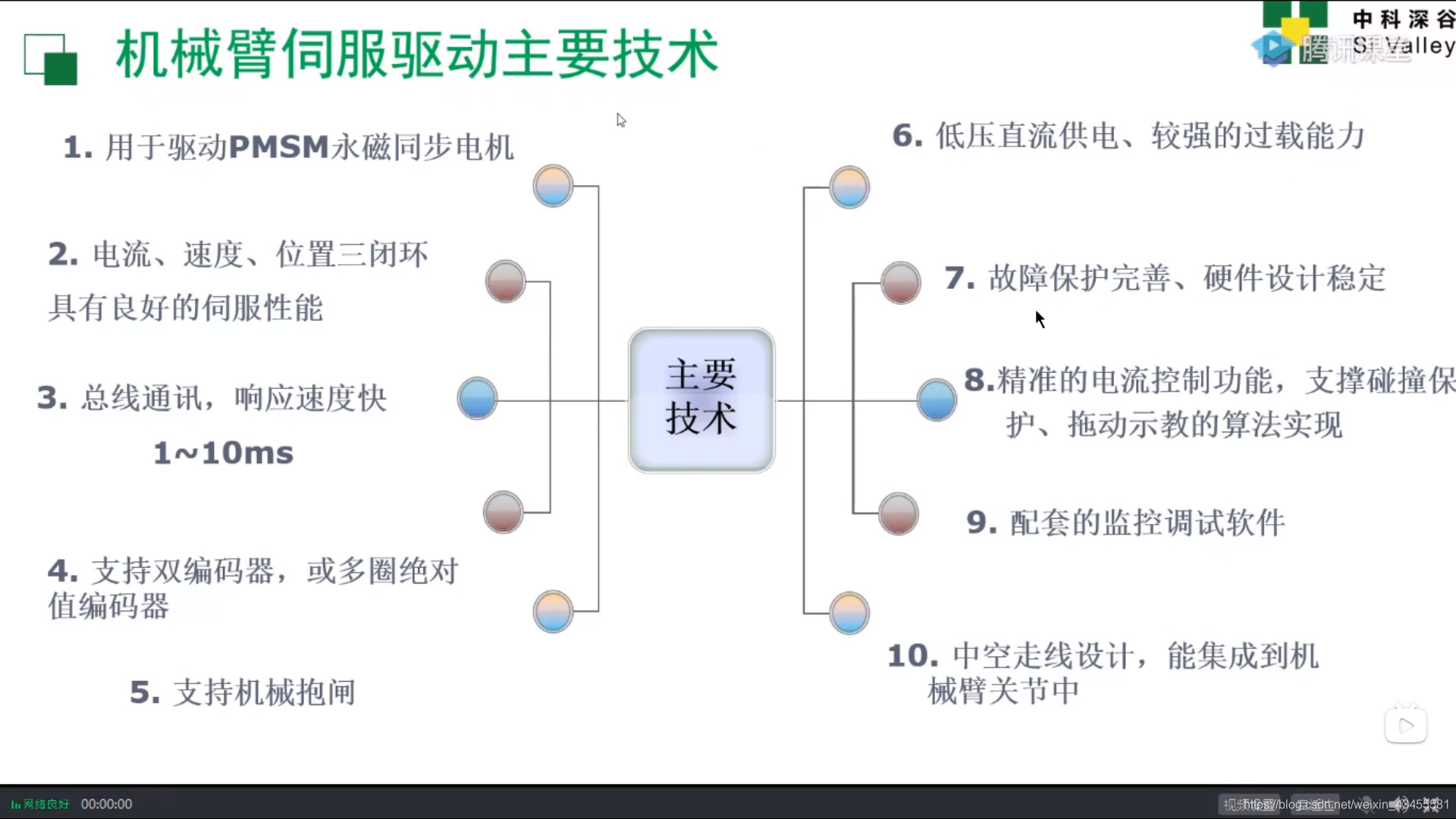
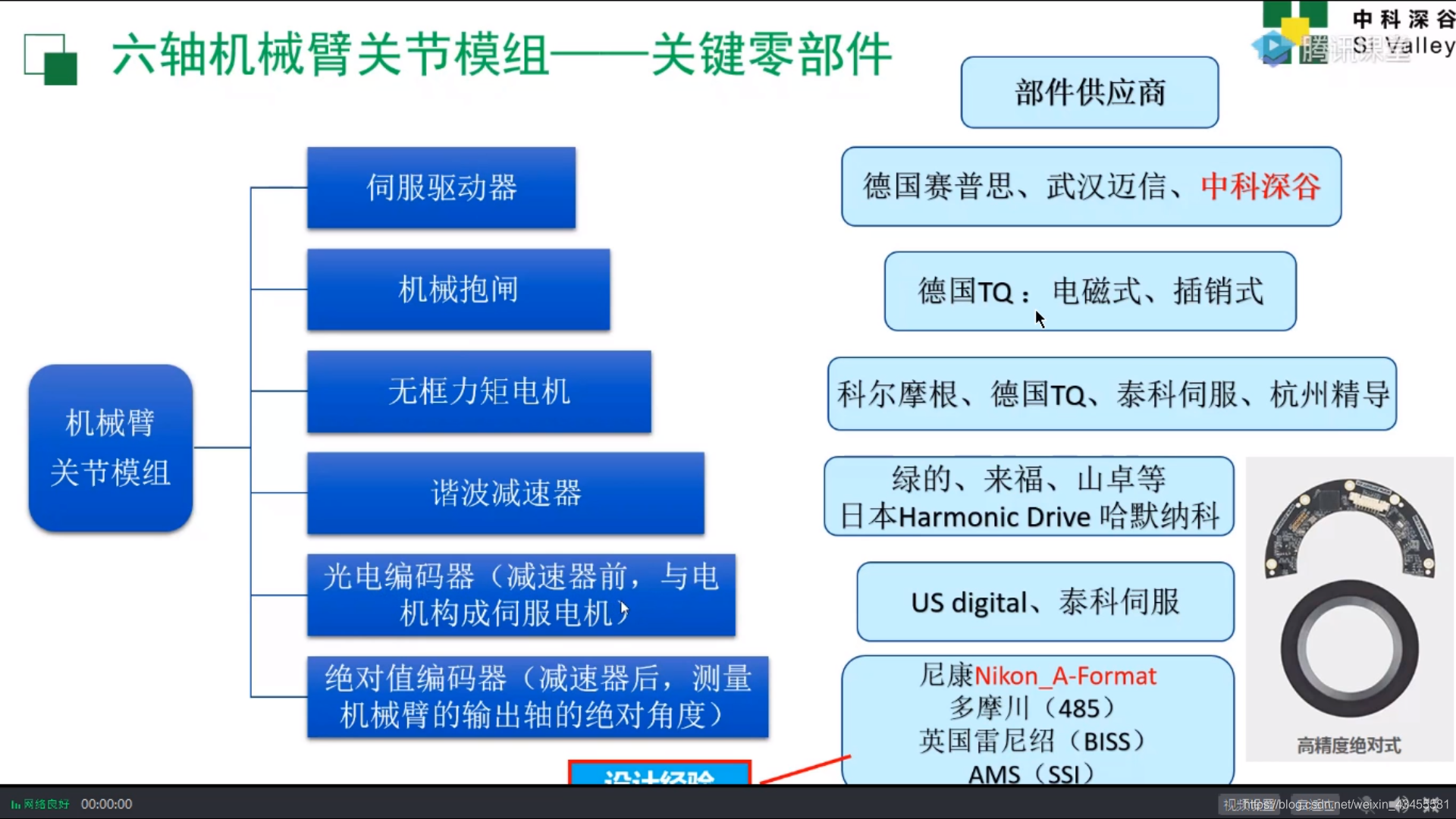
协作机械臂伺服驱动关键技术公开课笔记





发布日期:2021-07-01 04:03:43
浏览次数:2
分类:技术文章
本文共 46 字,大约阅读时间需要 1 分钟。
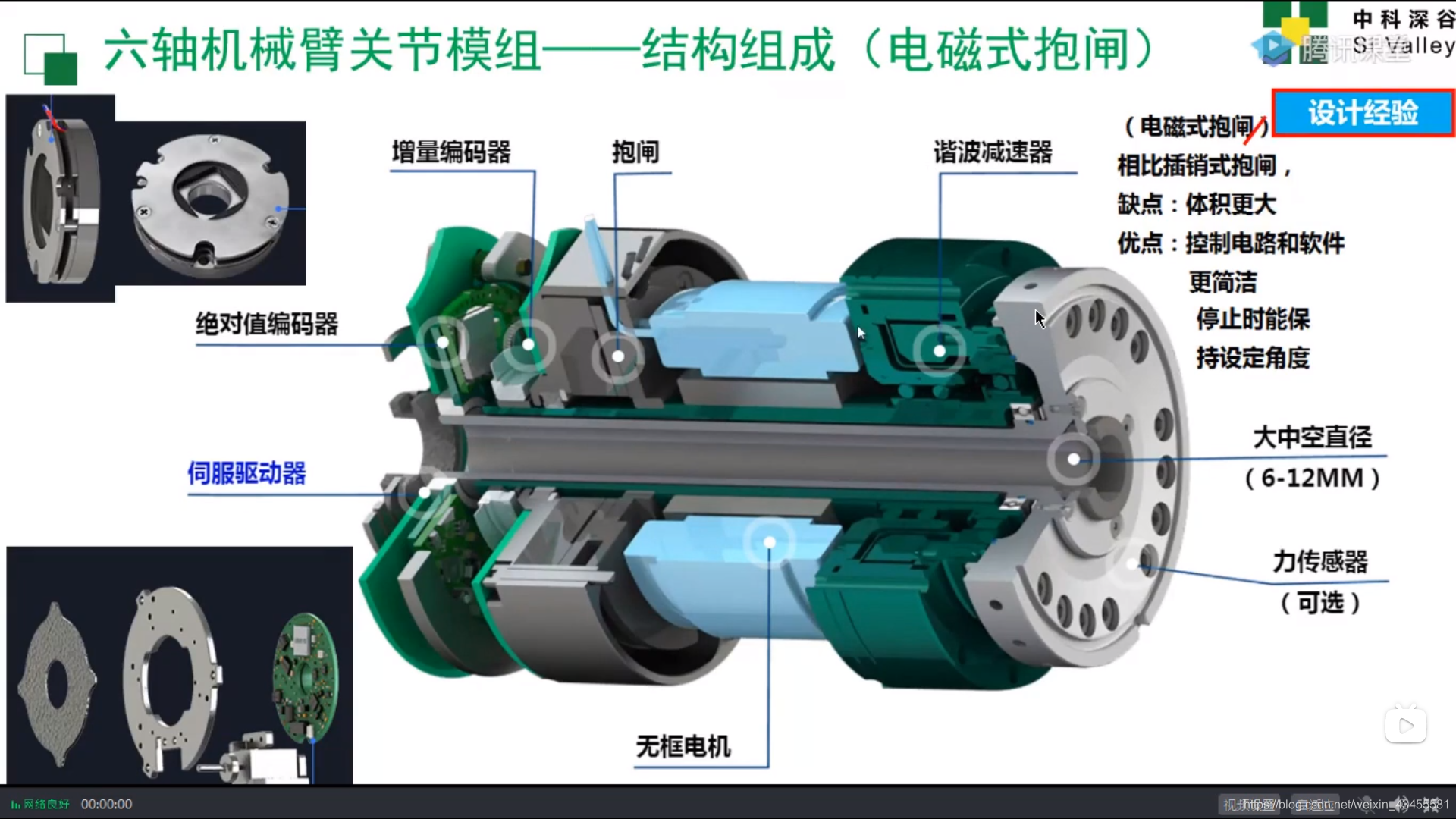
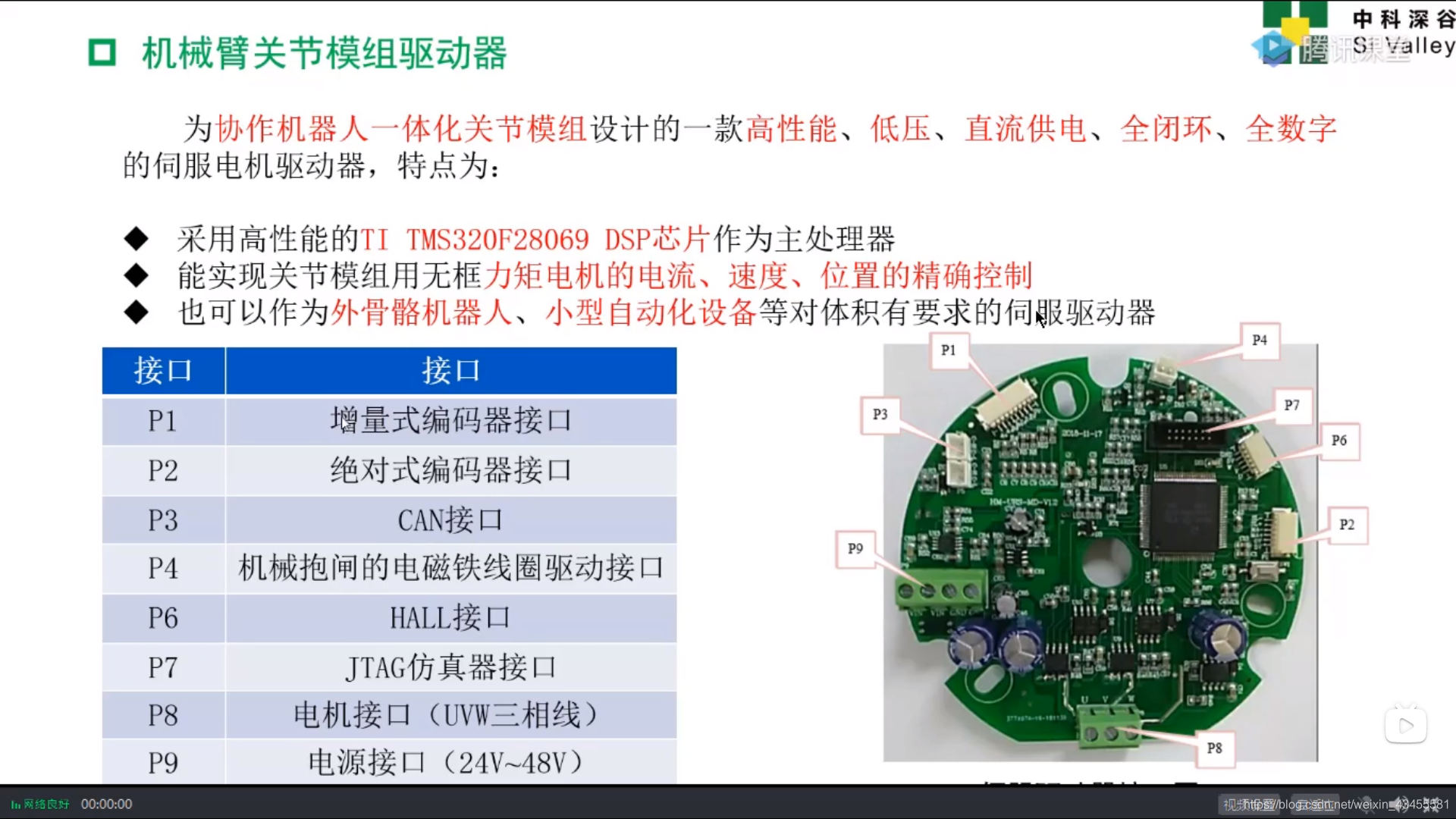
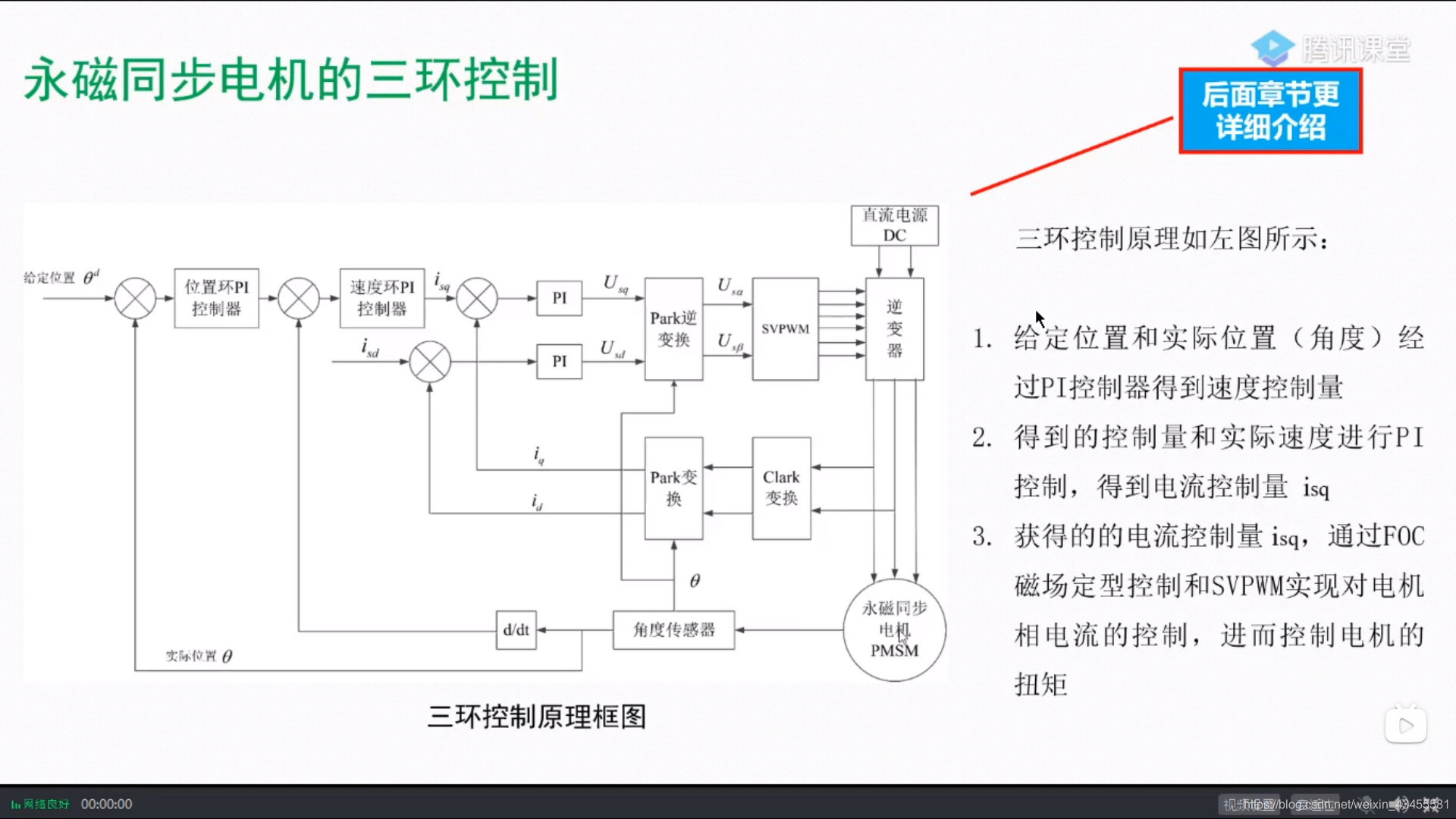
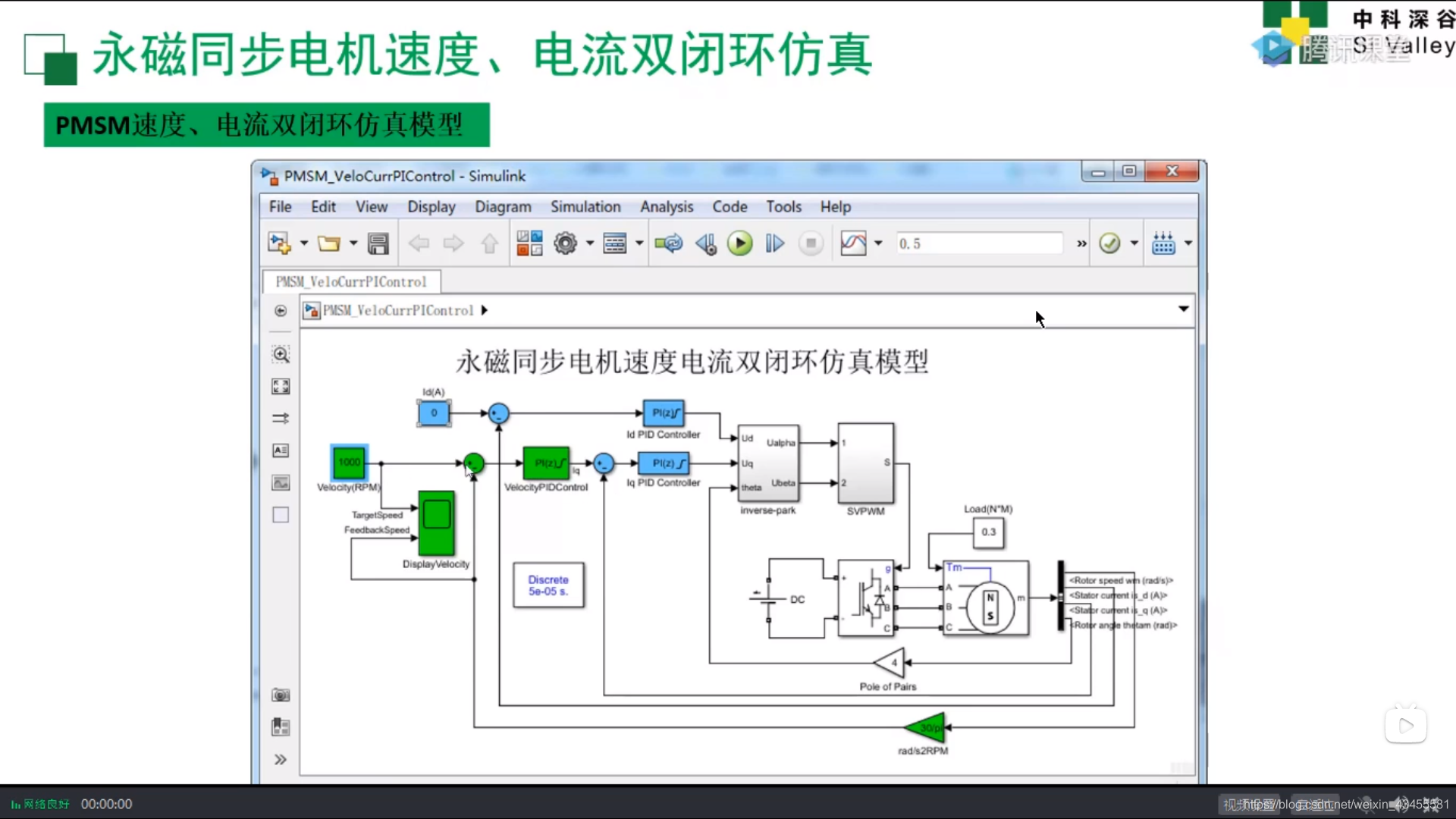
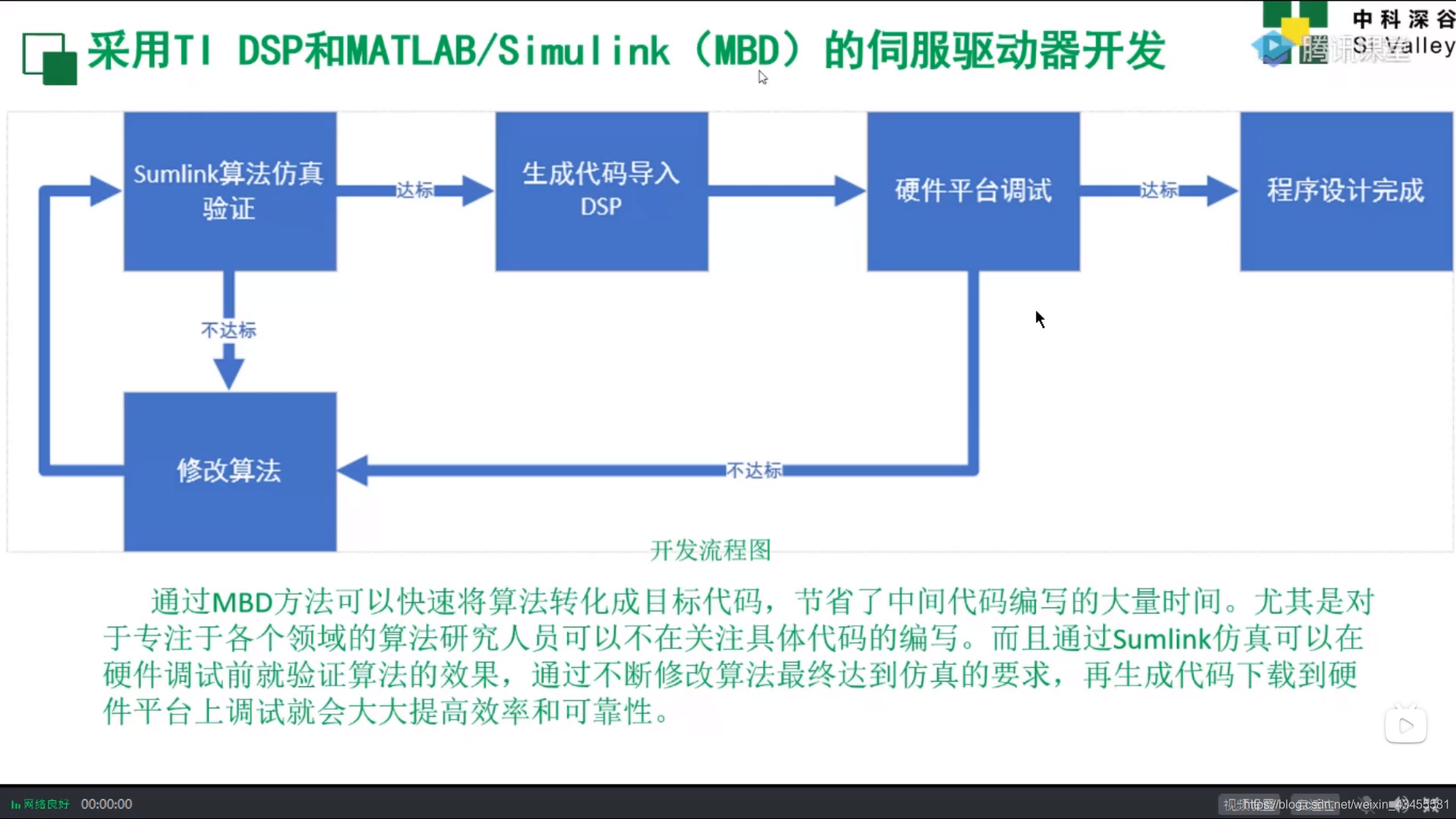
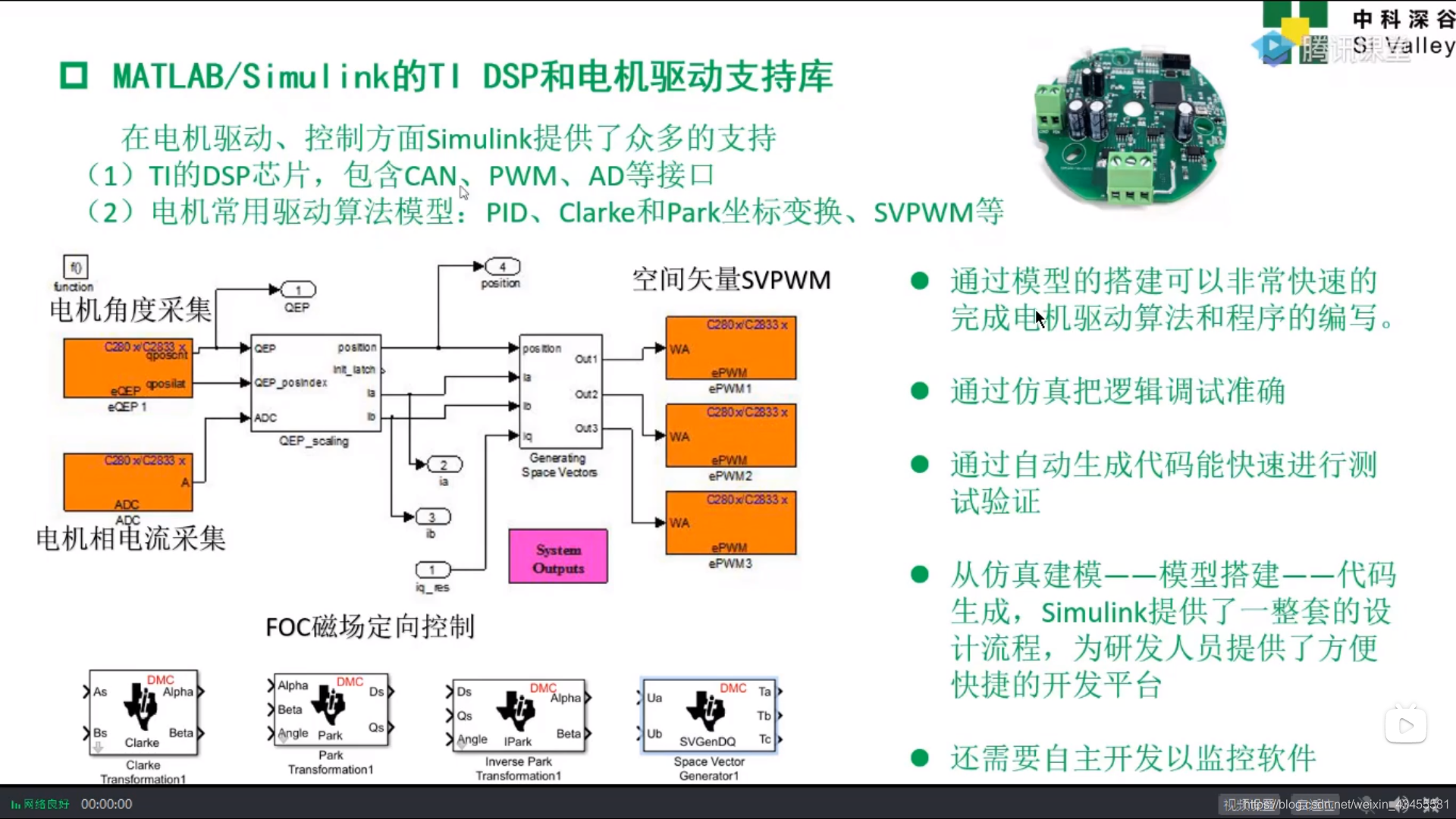
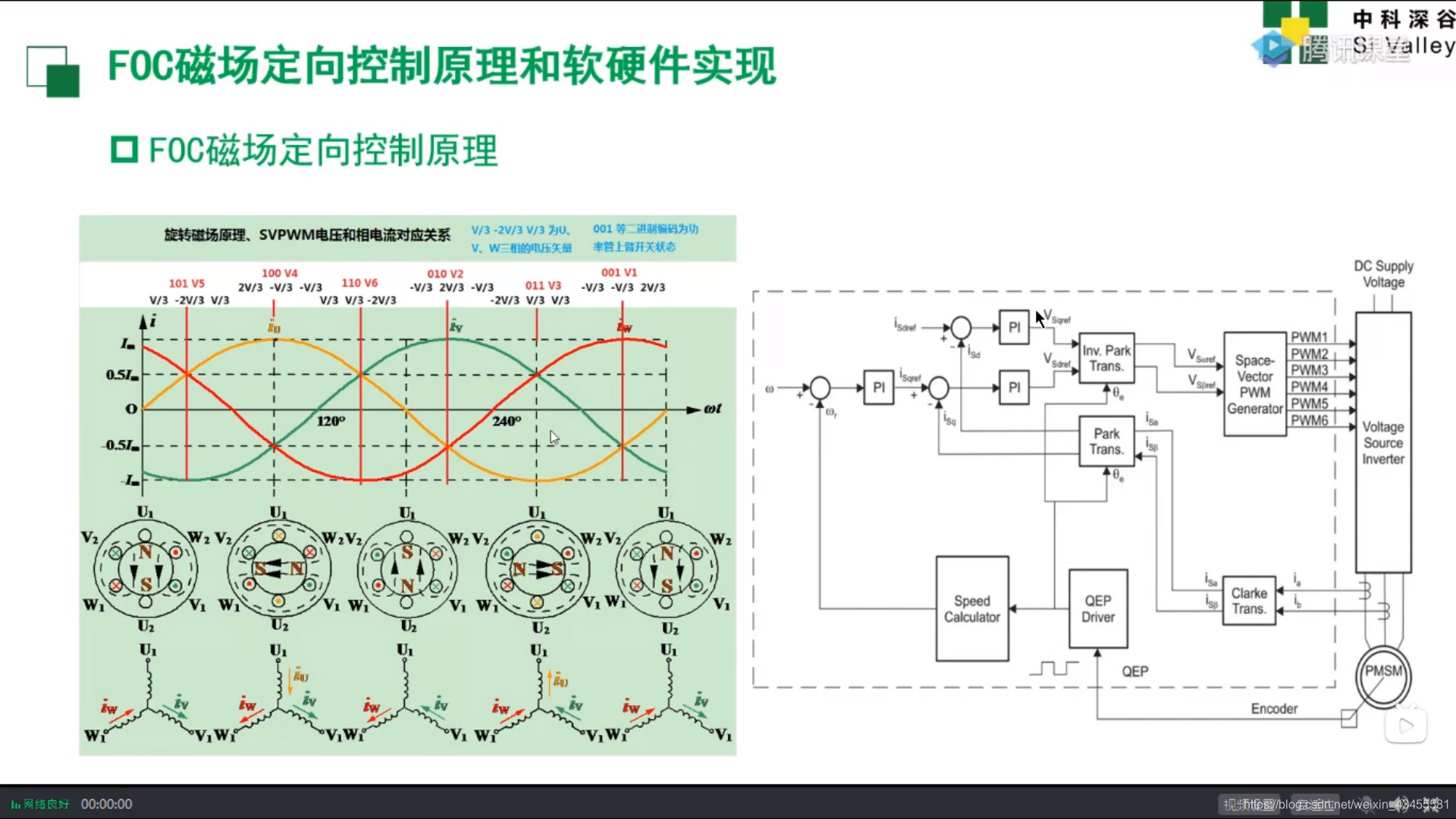
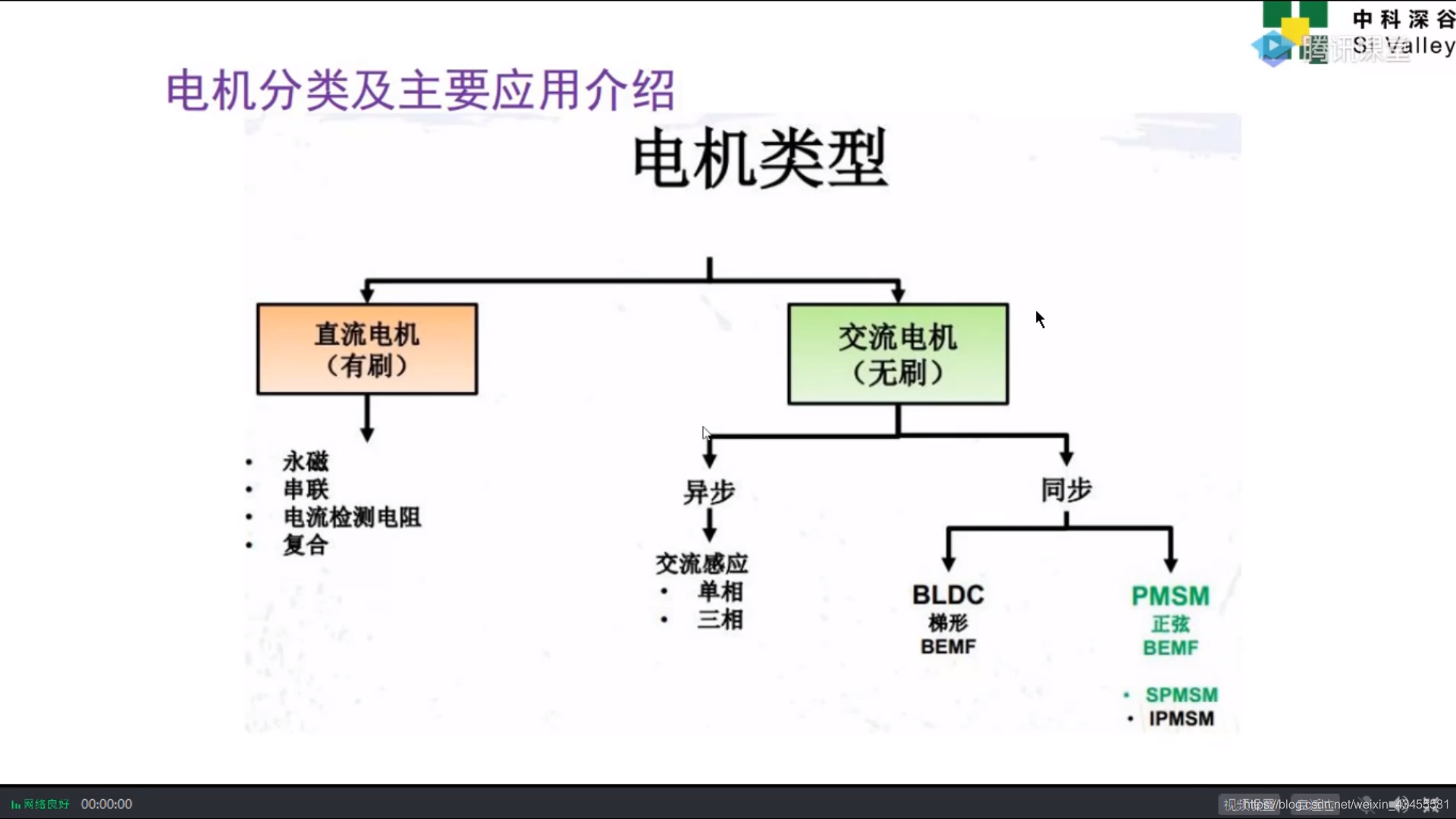
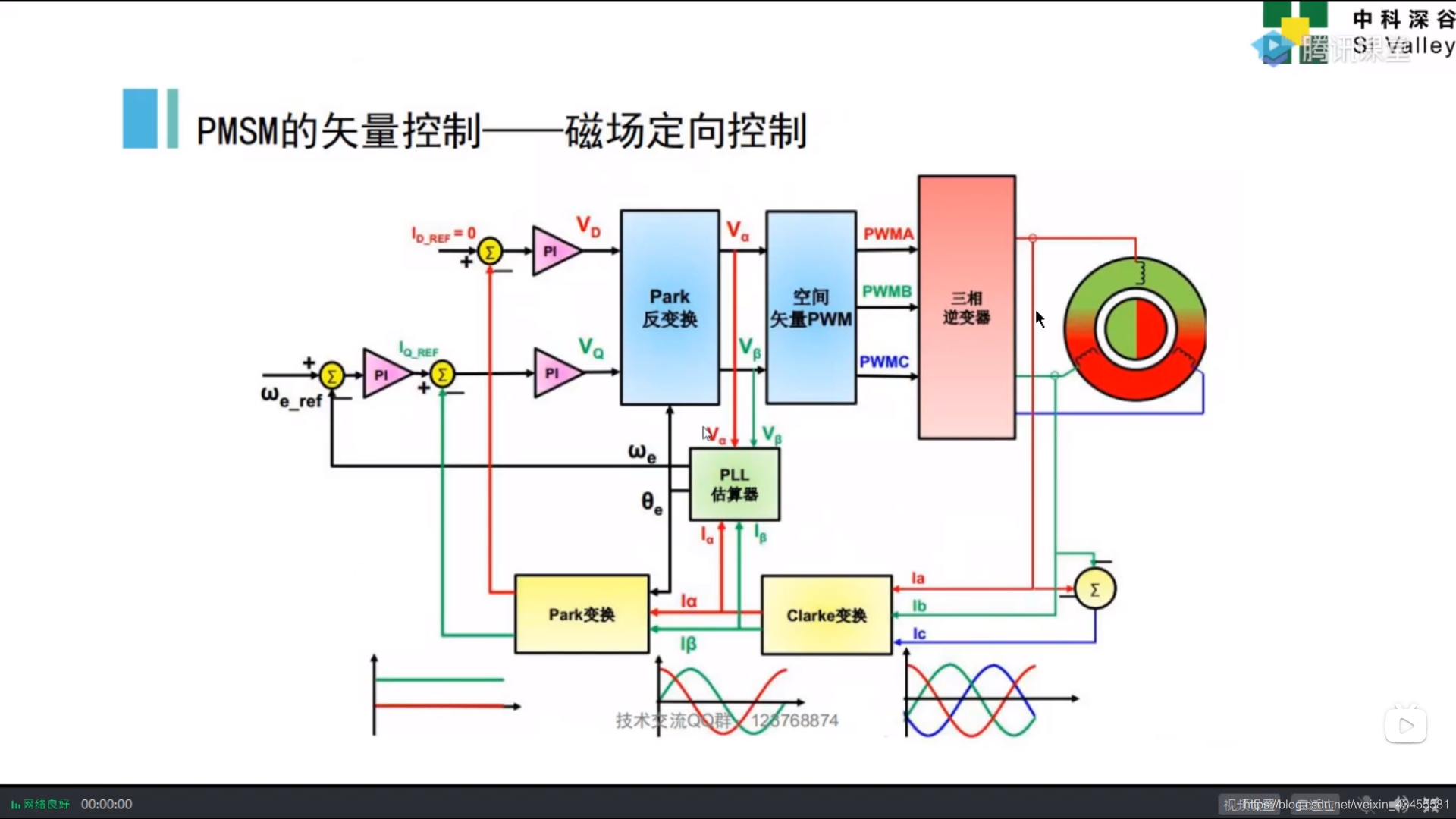
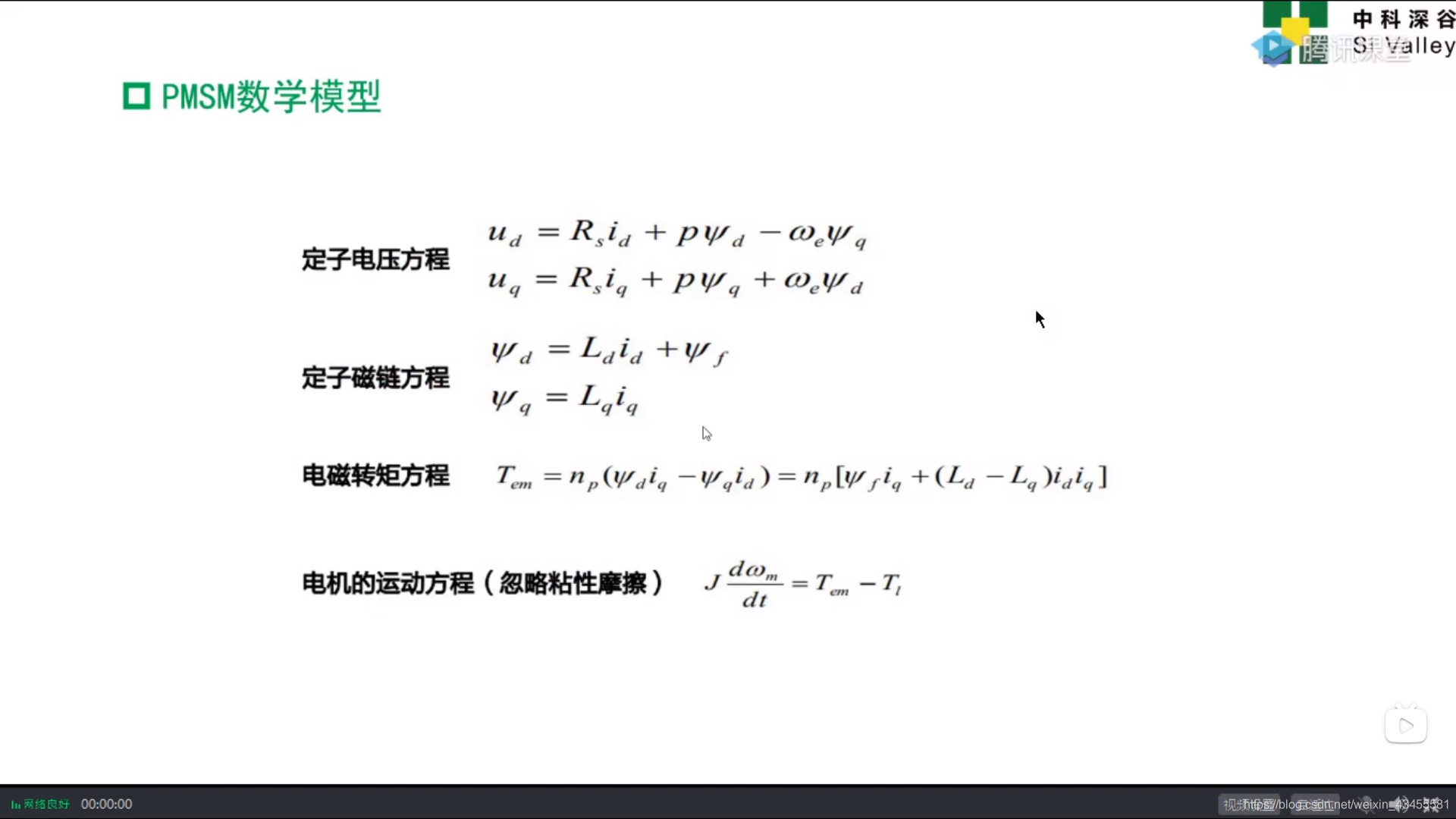
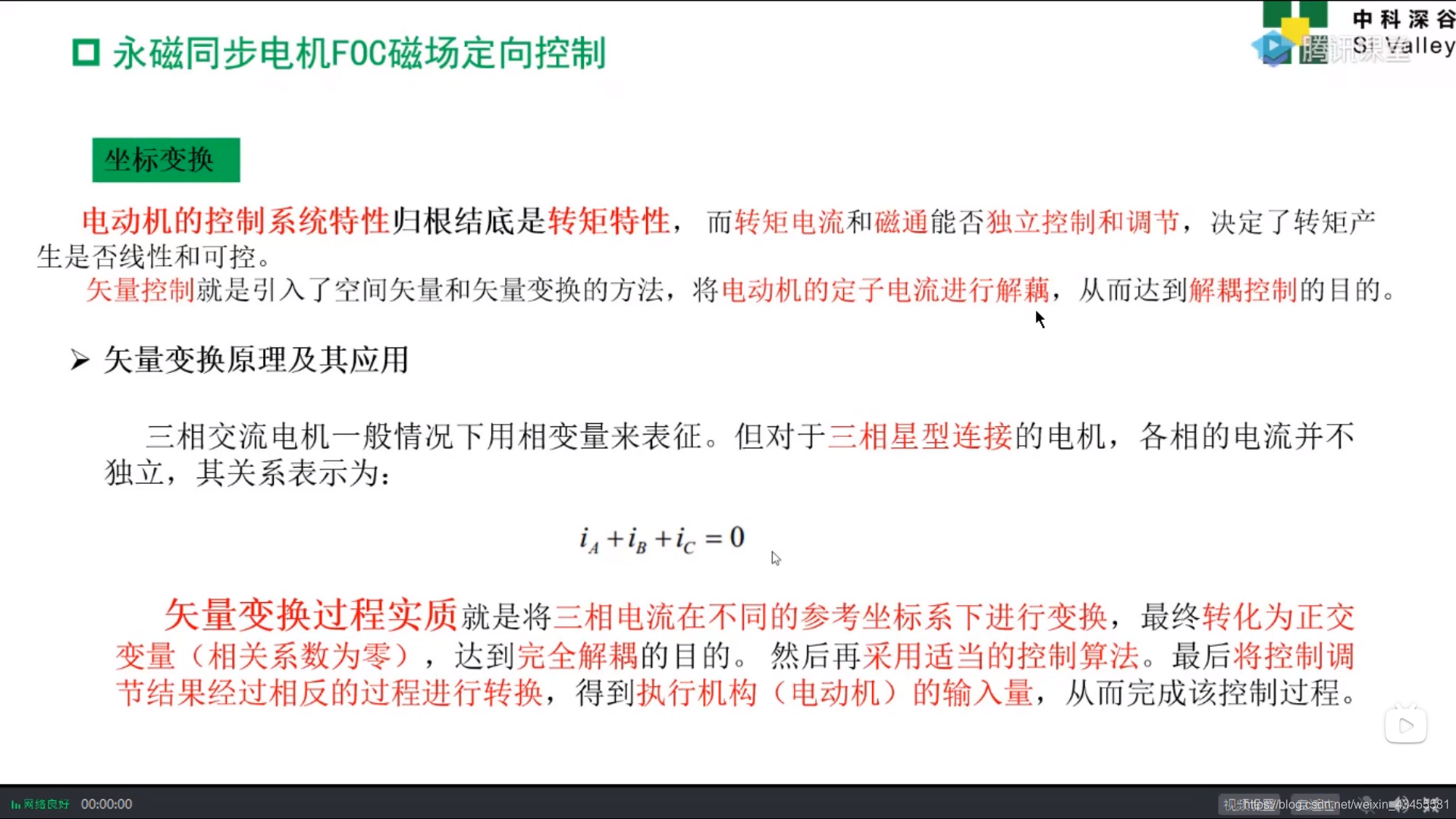
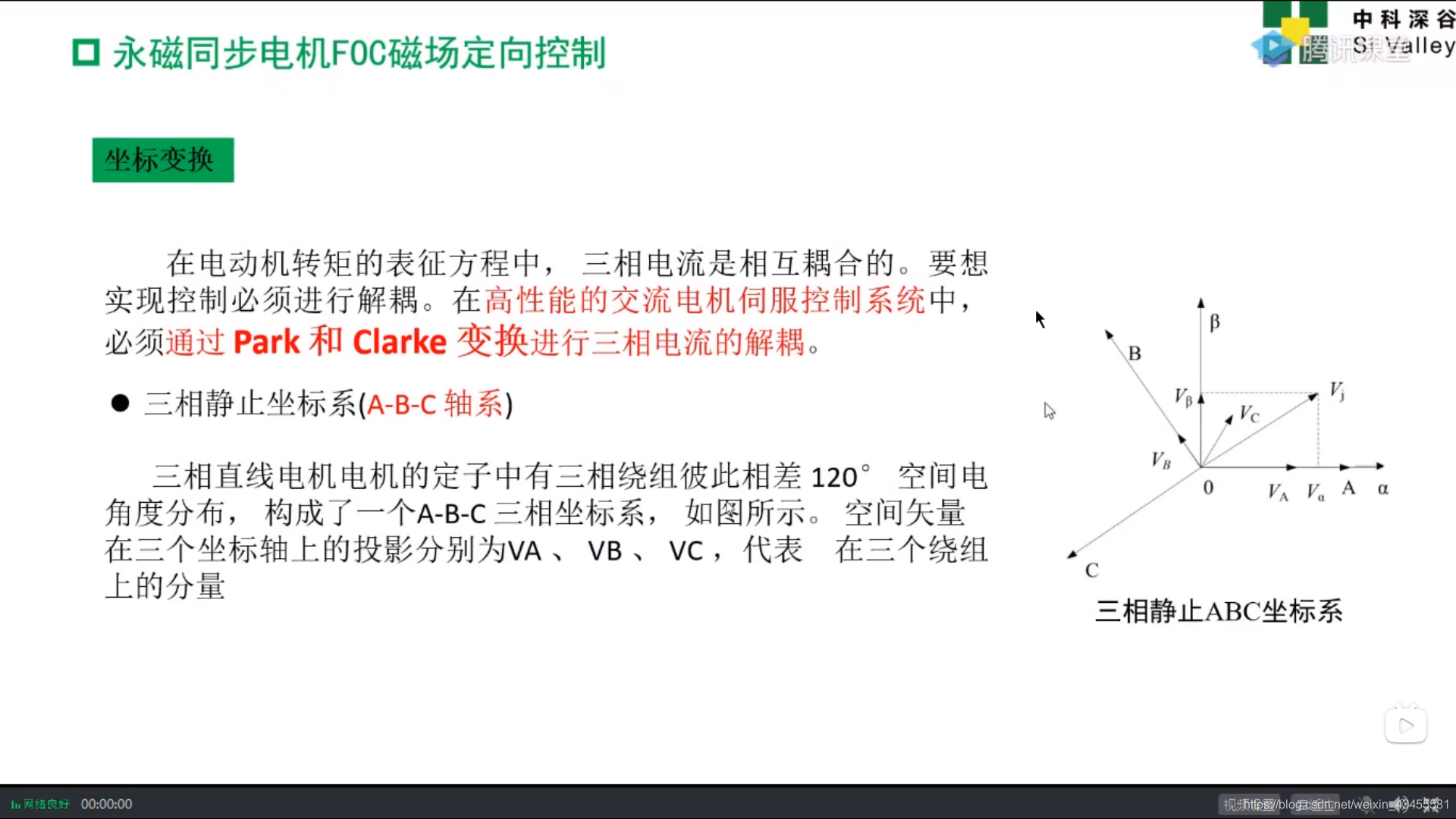
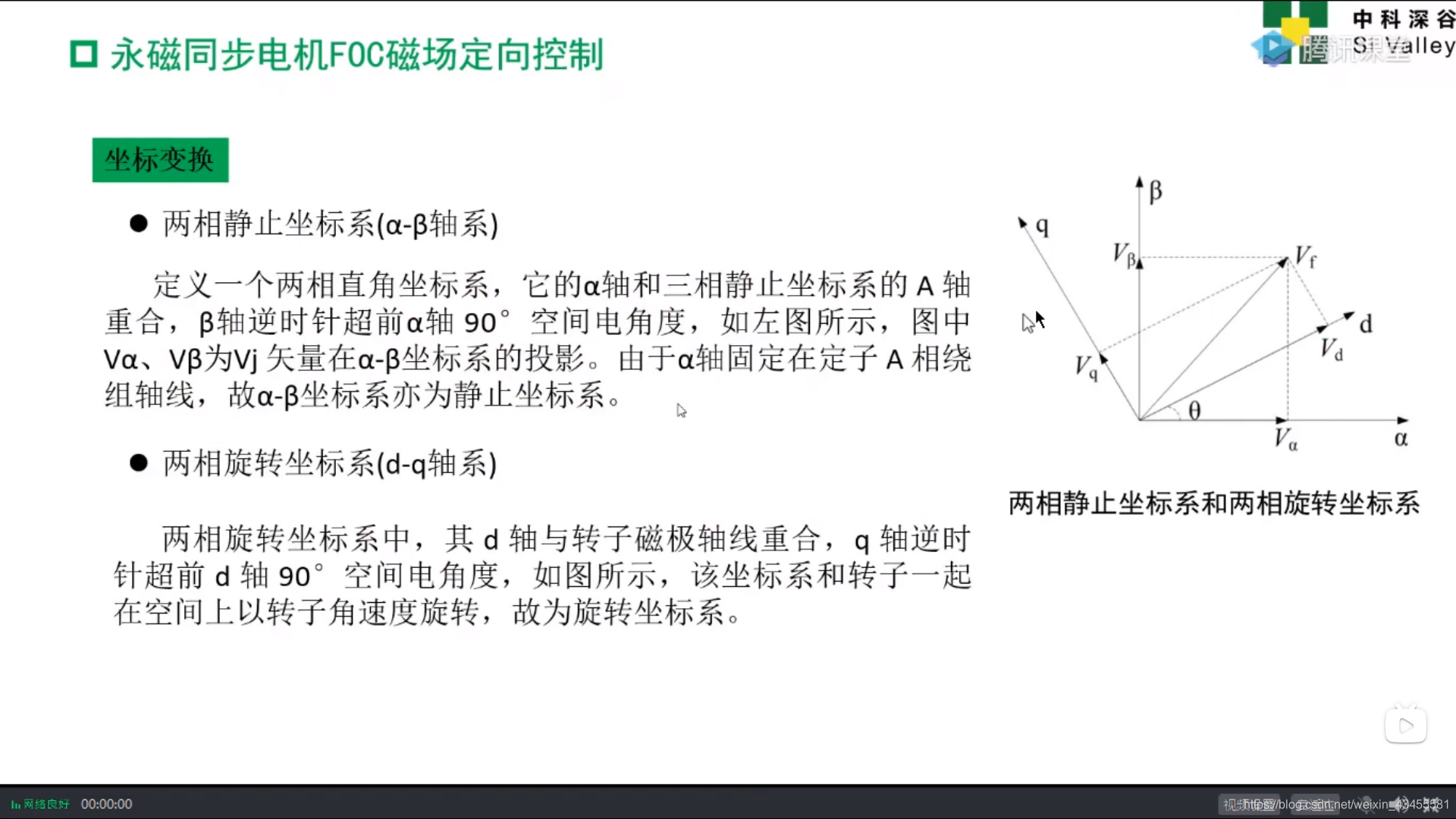
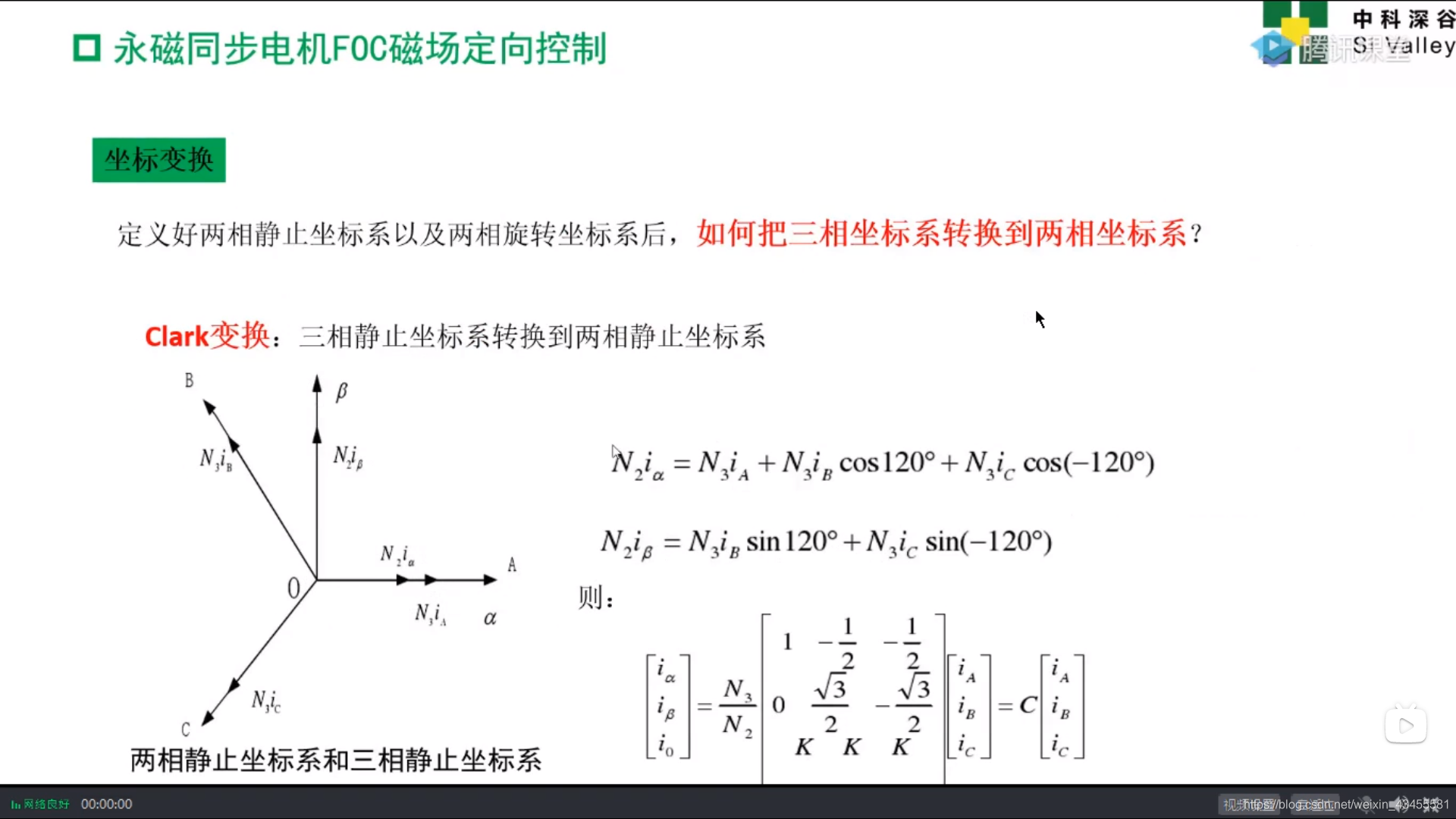
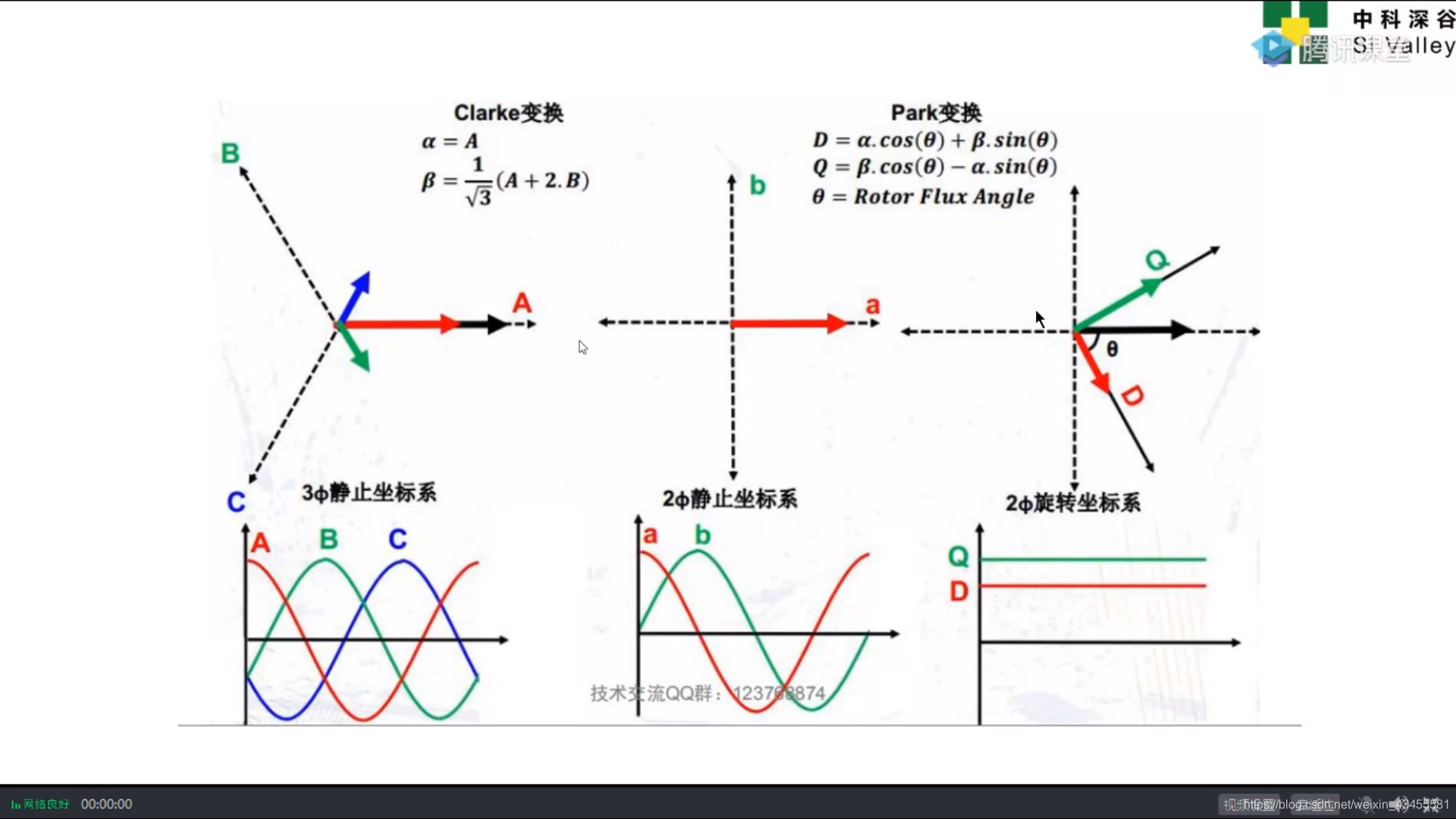
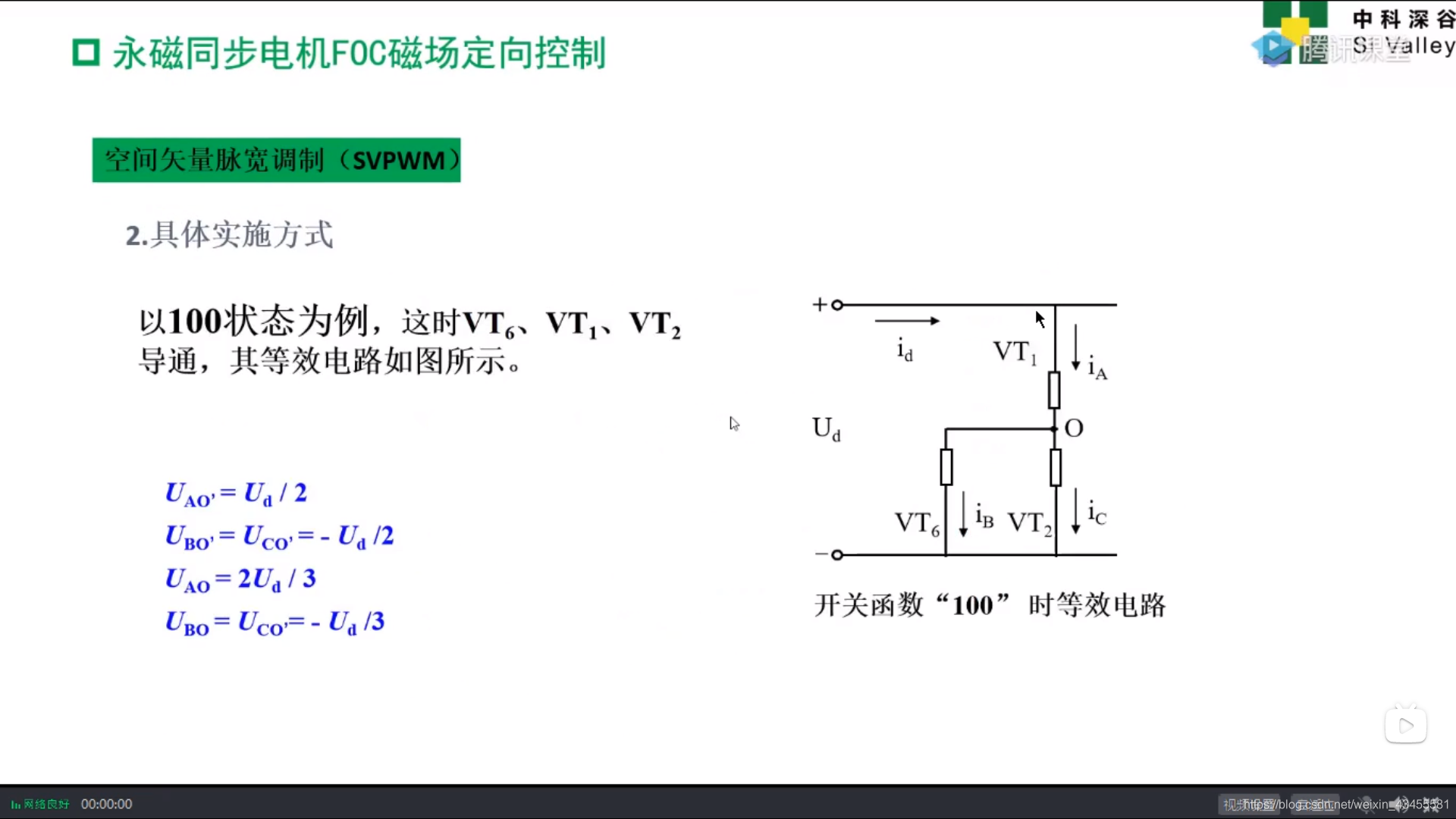
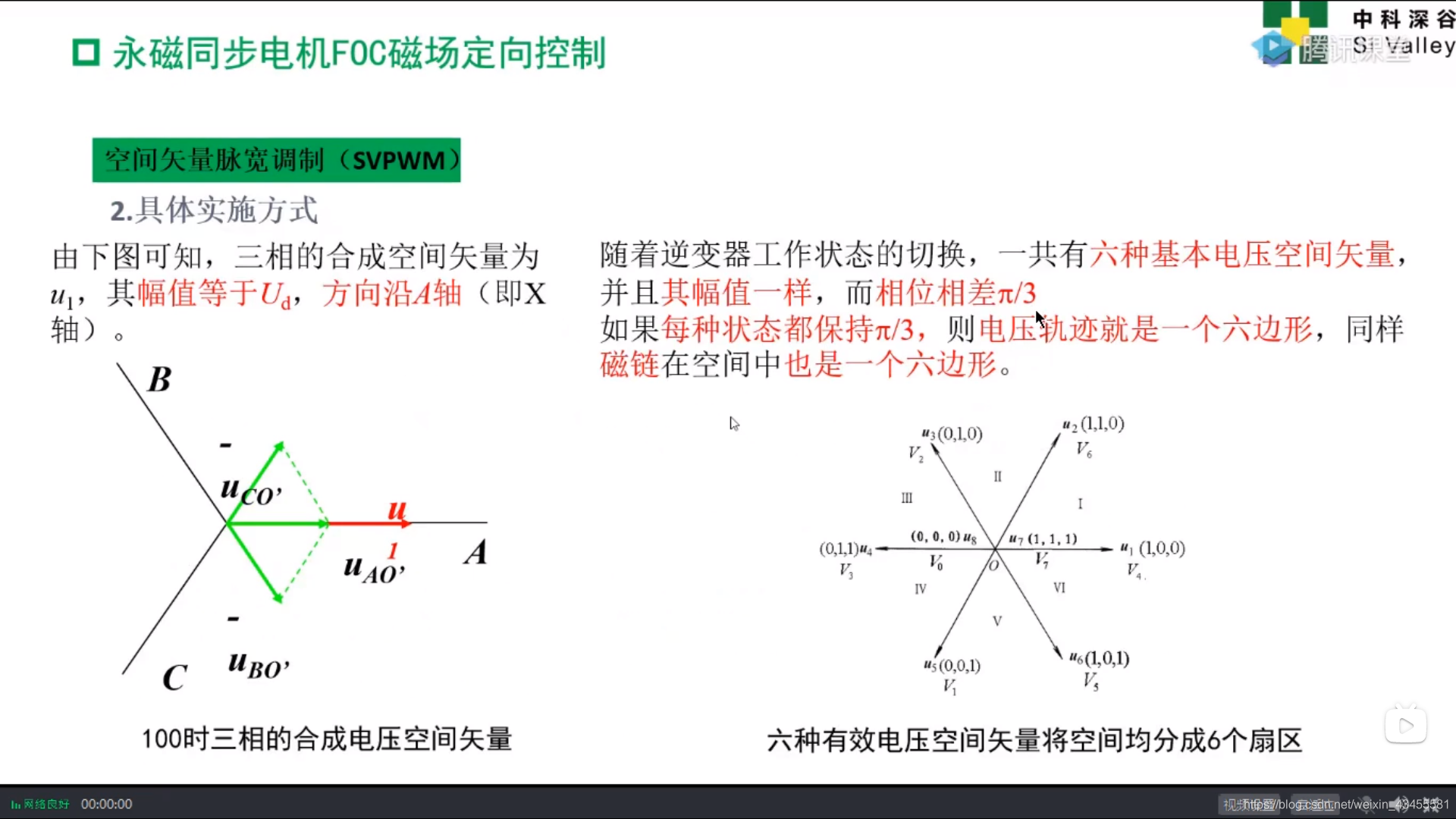
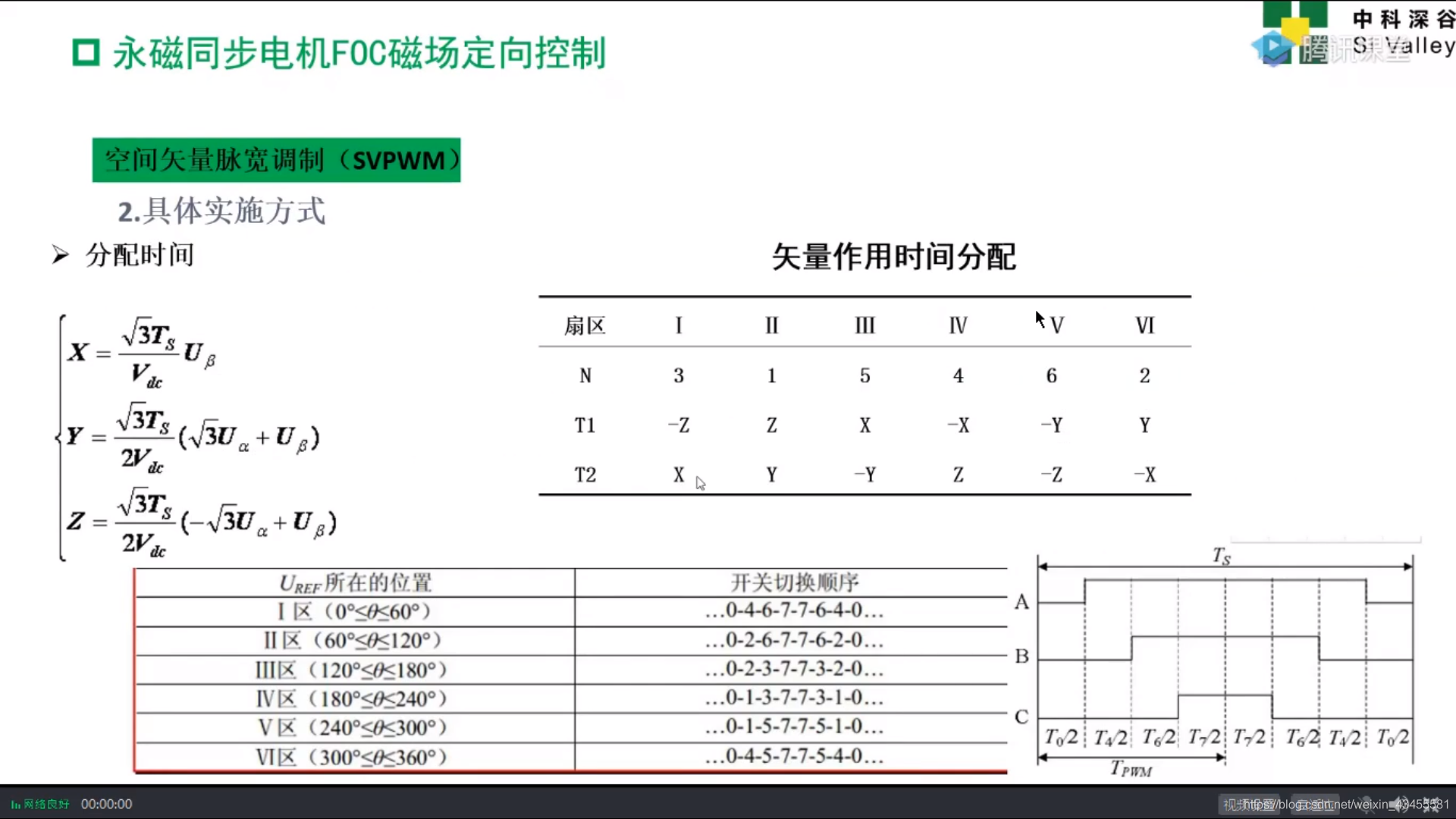
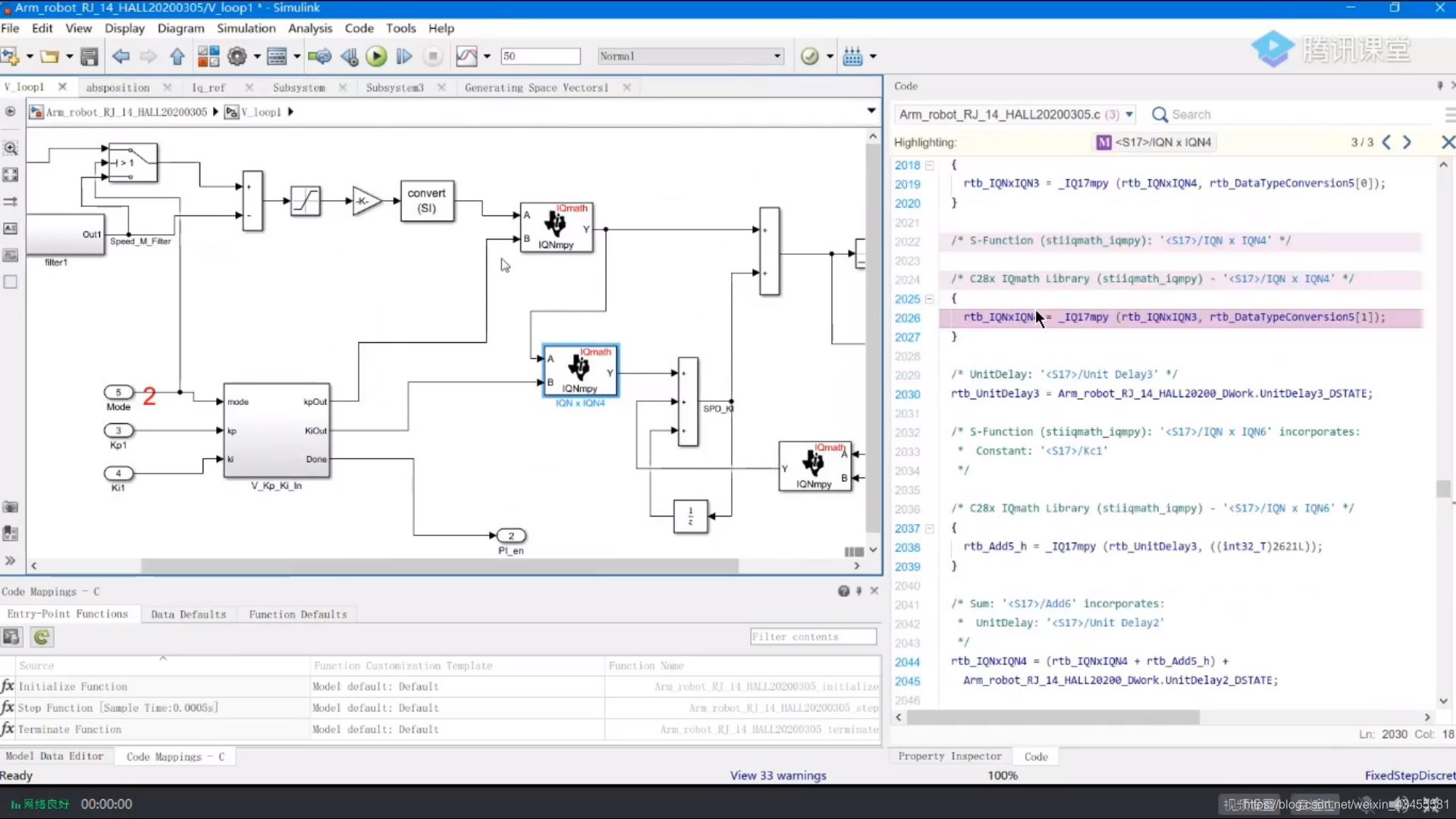
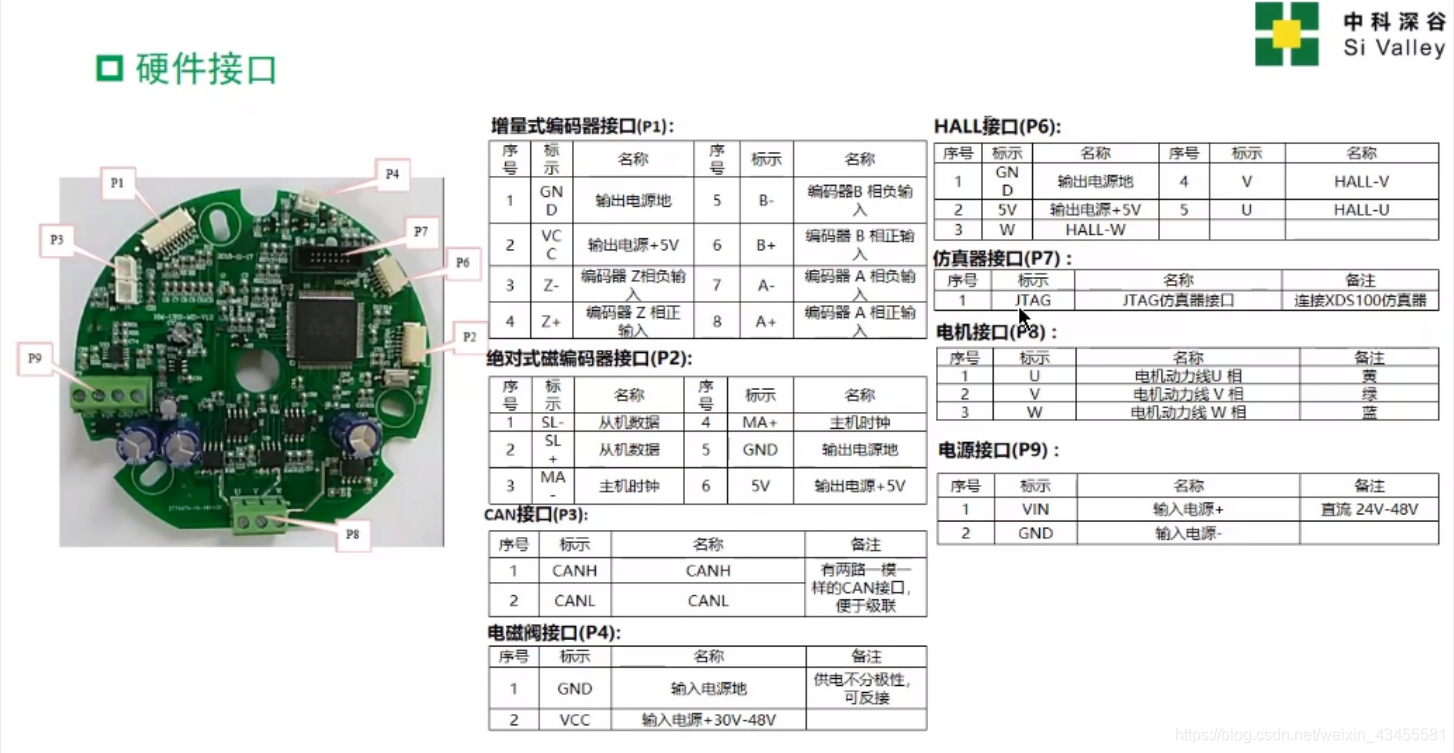
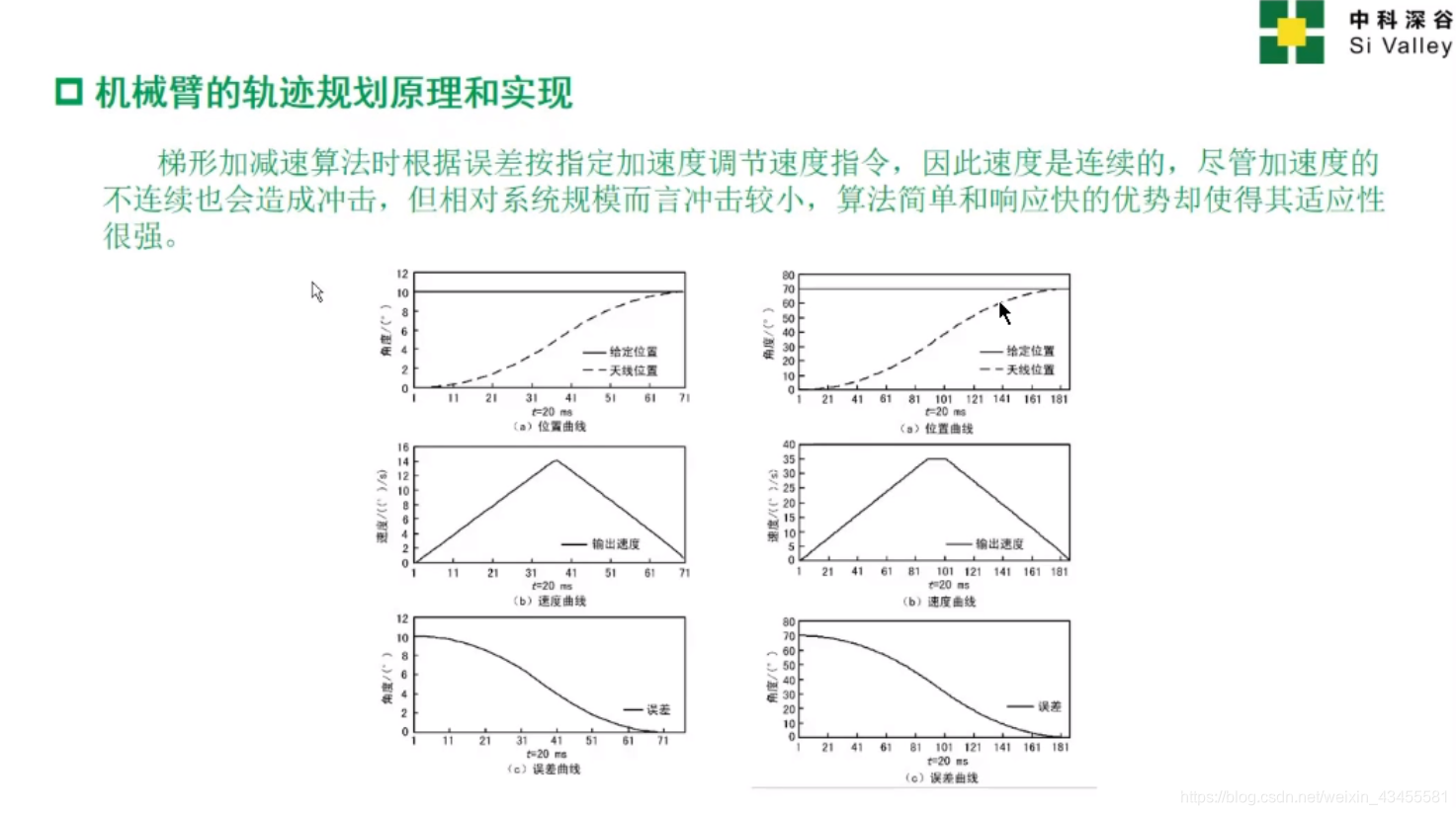
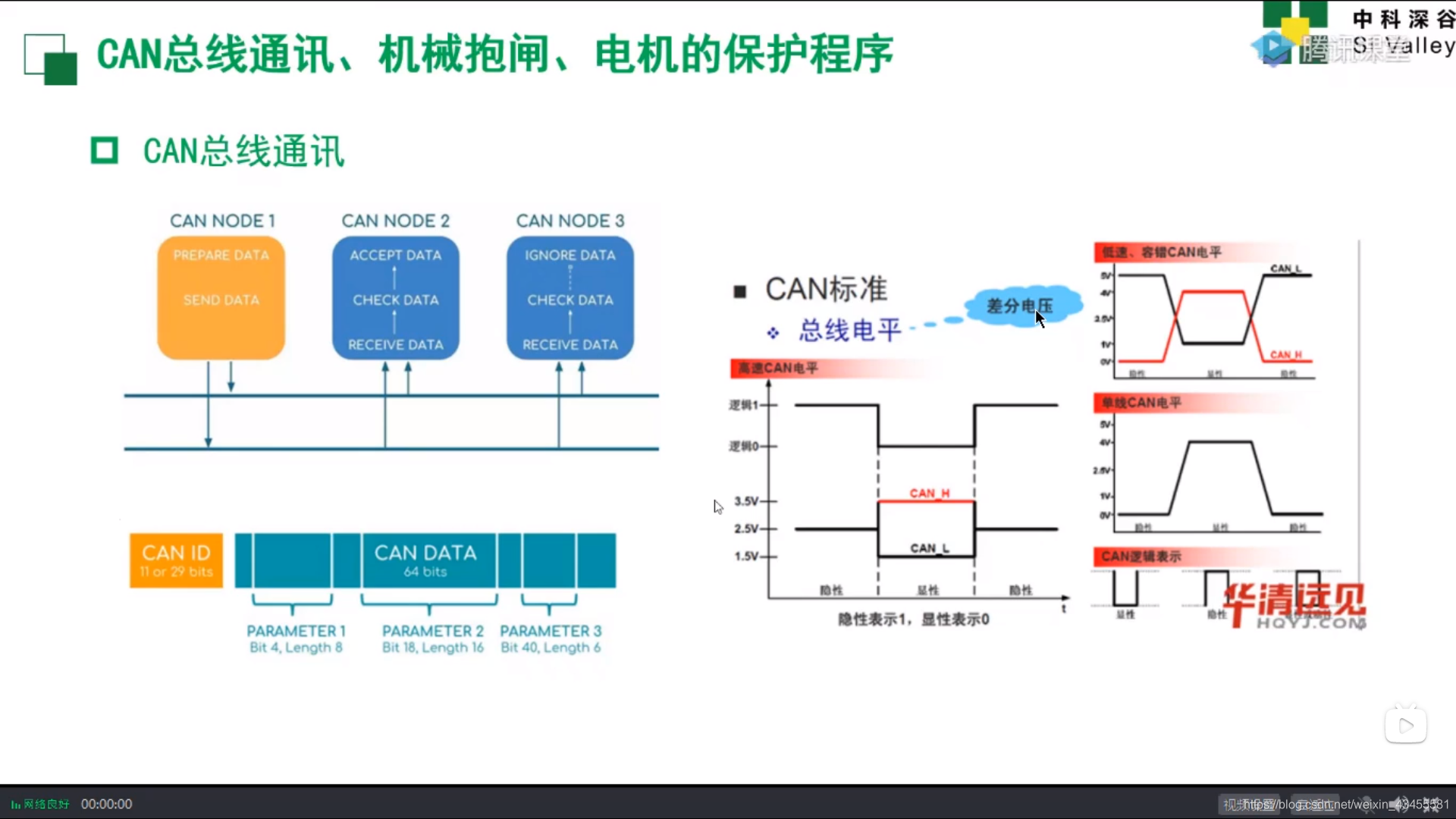
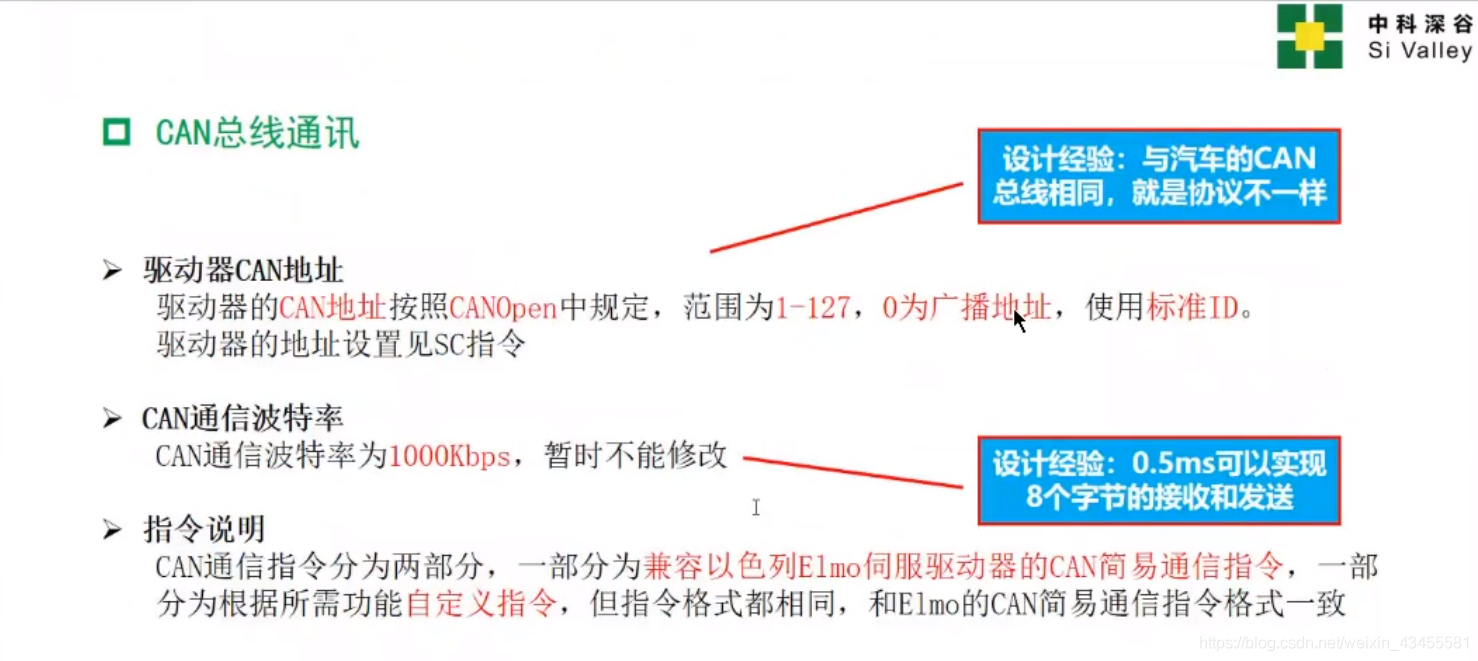
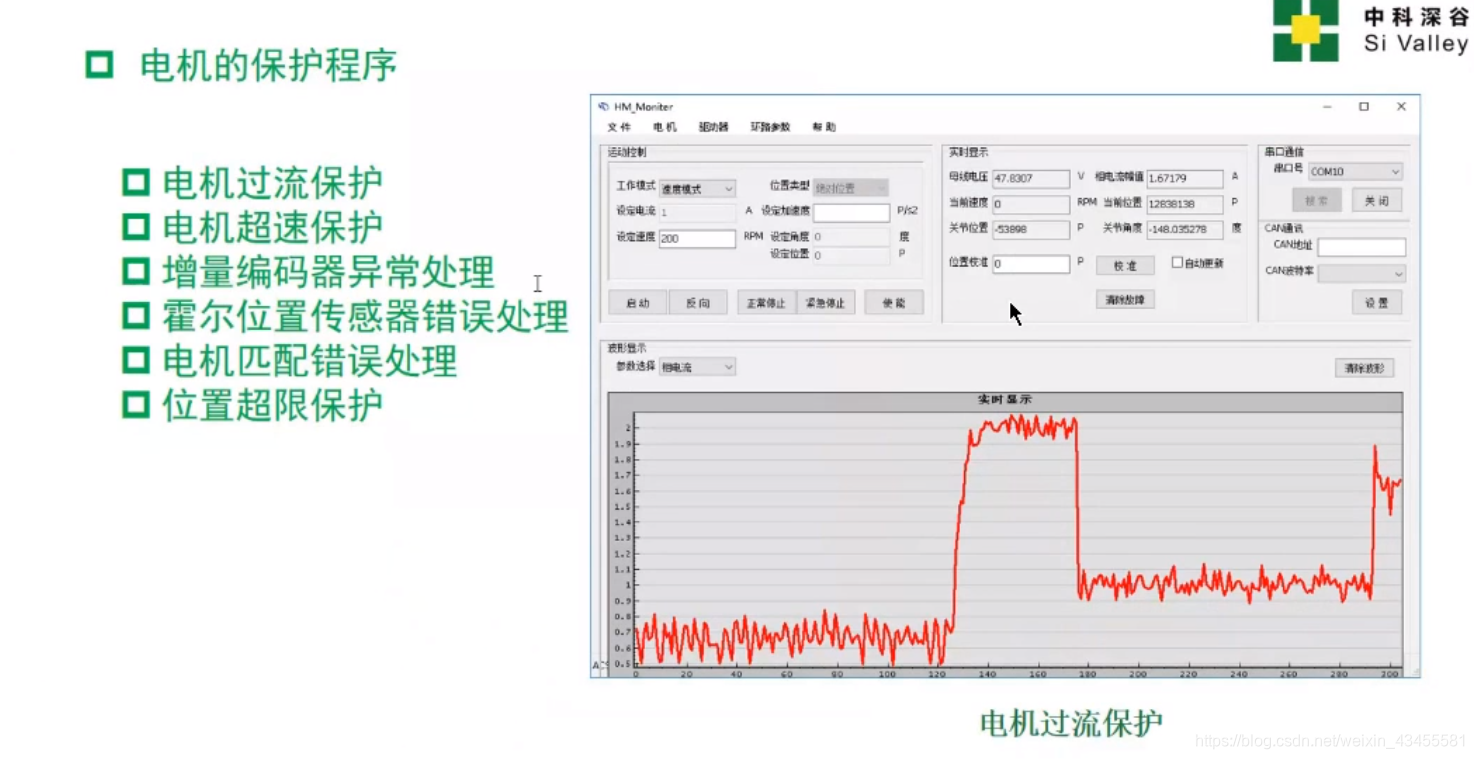
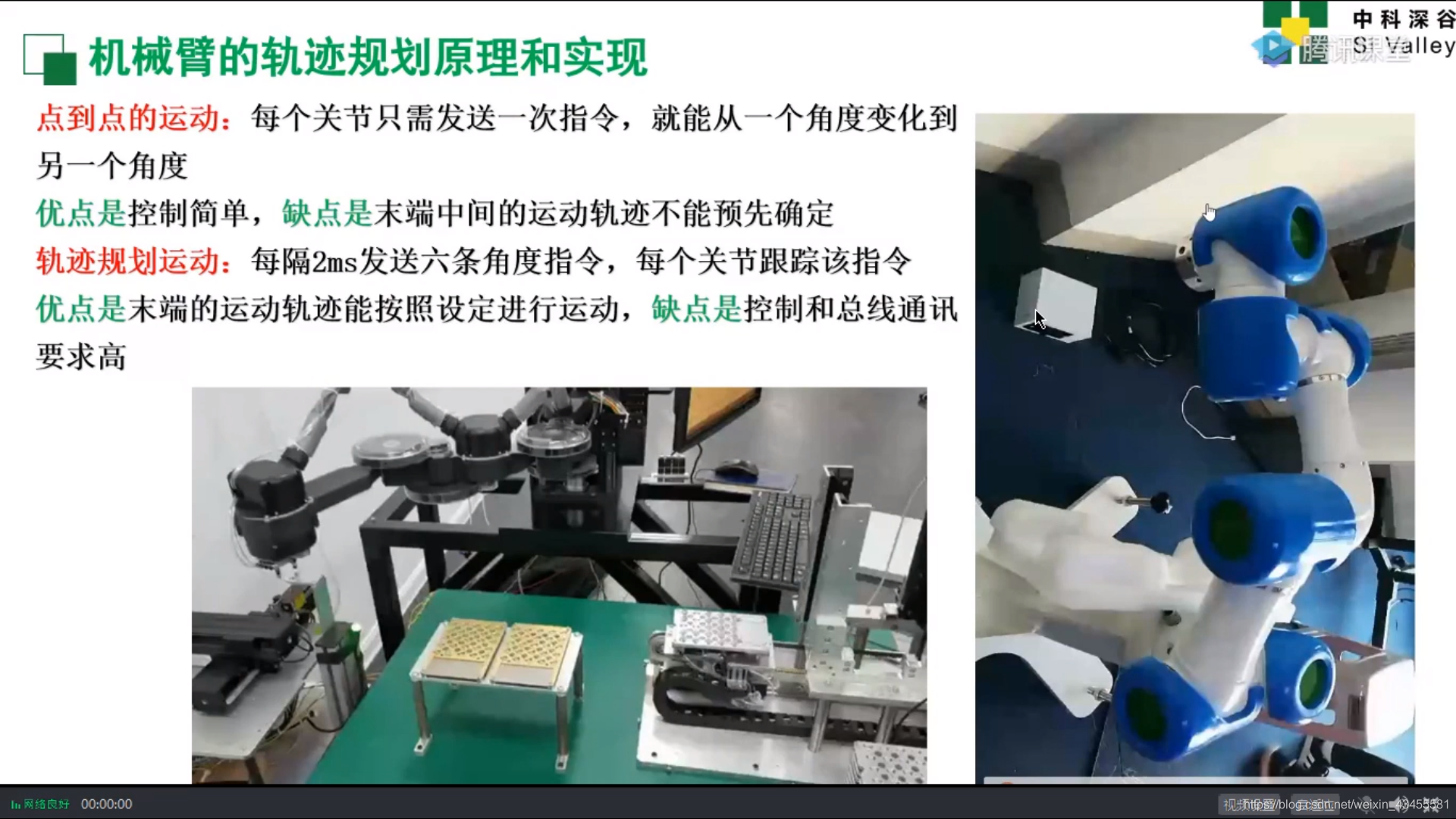
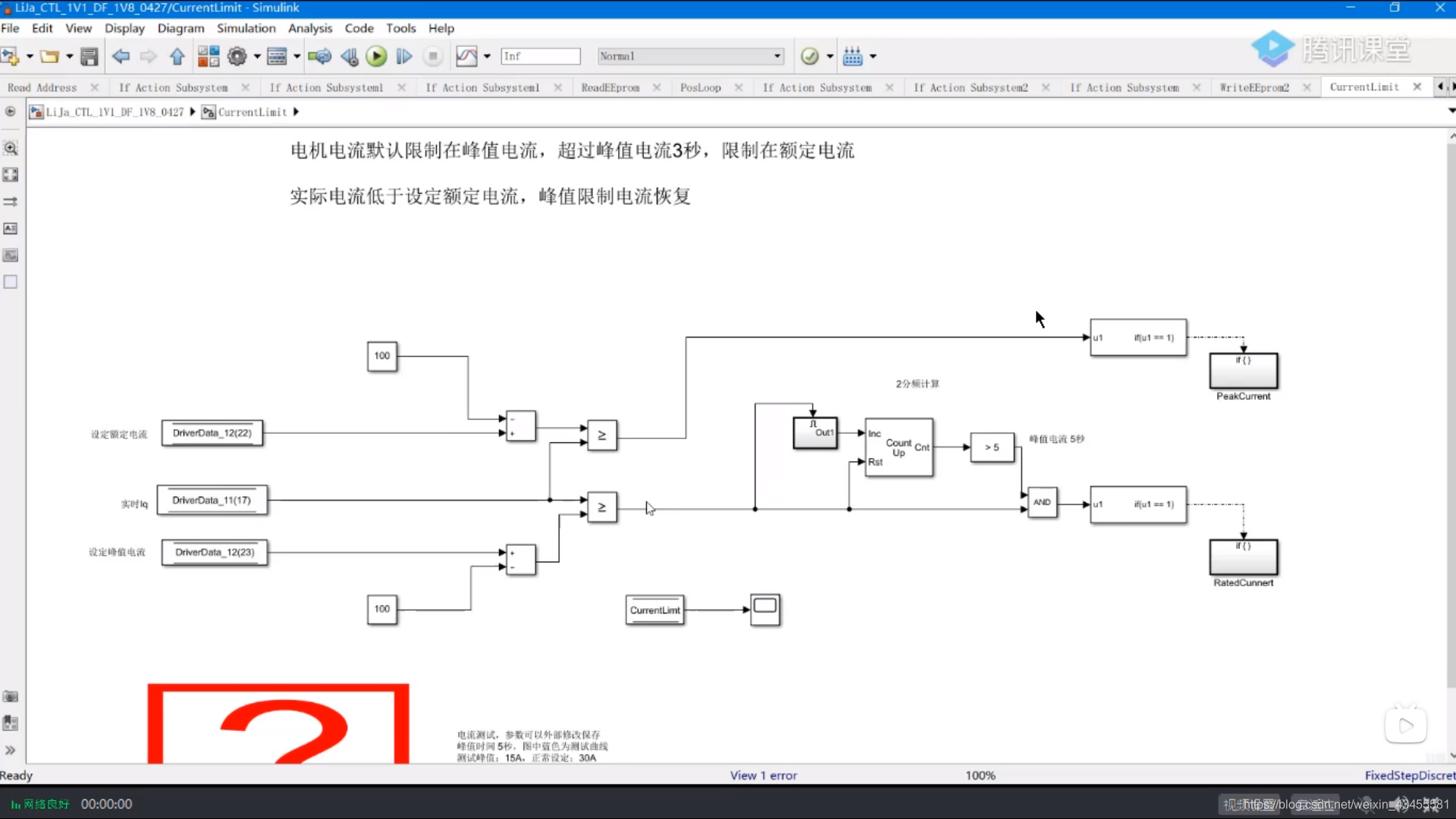
声明:本文所有图片均截自bilibili中科深谷UP上传的公开课,仅作为个人笔记记录,侵删~
转载地址:https://miracle.blog.csdn.net/article/details/116535734 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
不错!
[***.144.177.141]2024年04月13日 17时12分28秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
CodeForces - 456C Boredom (dp)
2019-04-30
CodeForces - 1042B Vitamins (思维)
2019-04-30
ACM 2013 长沙区域赛 Collision (几何)
2019-04-30
ACM 2014 鞍山区域赛 E - Hatsune Miku (dp)
2019-04-30
反向传播&梯度下降 的直观理解程序(numpy)
2019-04-30
ACM 2017 北京区域赛 J-Pangu and Stones(区间dp)
2019-04-30
java常用类 String面试题
2019-04-30
四线触摸屏原理
2019-04-30
C/C++如何返回一个数组/指针
2019-04-30
腾讯AI语音识别API踩坑记录
2019-04-30
@FeignClient注解的重复名称解决
2019-05-01
java.net.BindException: 无法指定被请求的地址
2019-05-01
scala list
2019-05-01
svn服务器安装
2019-05-01
spark 笔记1
2019-05-01
shell dirname basename
2019-05-01
未来已至,5G加持下的云游戏将走向何方?
2019-05-01
计算机网络 —— 网络层 1.
2019-05-01
Android 之 ContentProvider 与 ContentResolver
2019-05-01
【接口自动化】
2019-05-01
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311749905 位访客
访问时间: 2024-05-07 16:29:16
访问IP: 18.222.111.24
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版