硬件在环(HIL)仿真方案
发布日期:2021-07-01 04:03:39
浏览次数:4
分类:技术文章
本文共 236 字,大约阅读时间需要 1 分钟。
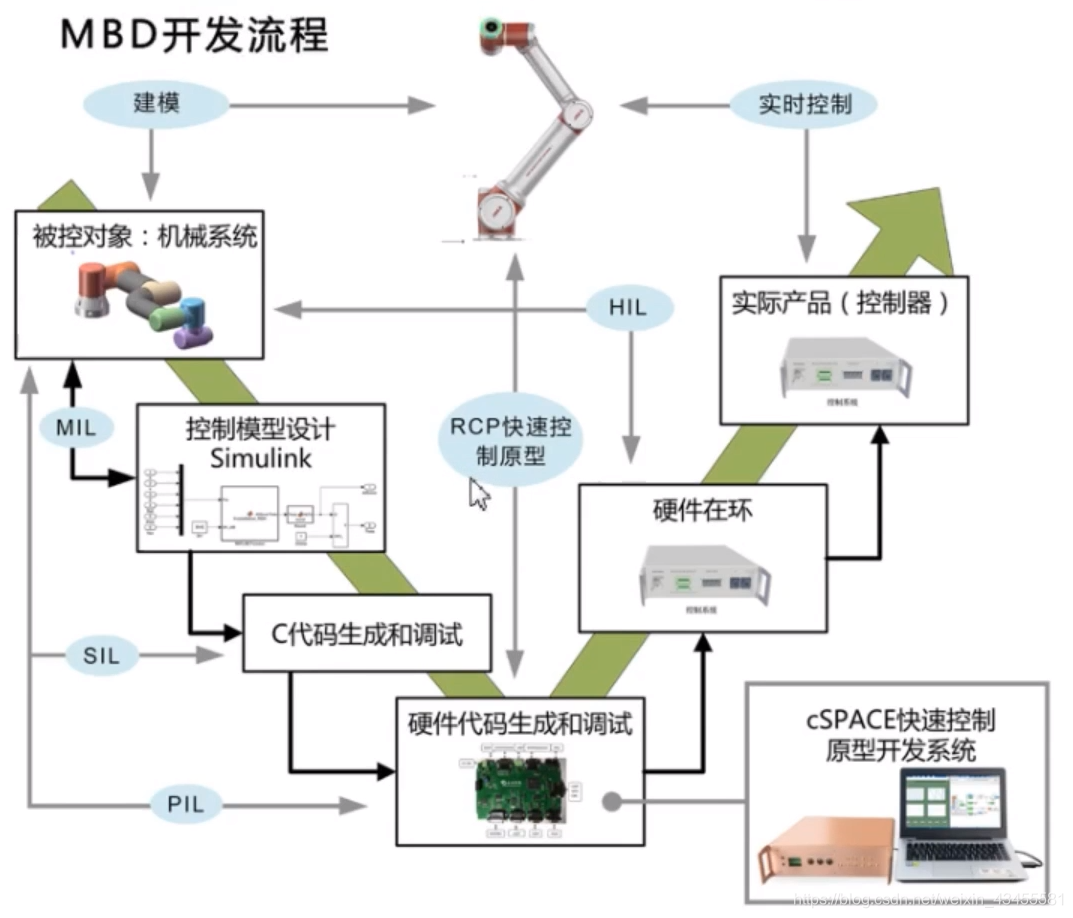
- 方案1:仿真模型在simulink中搭建,通过TCP或ROS等实现与实际控制器的通信,从而实现HIL仿真
- 方案2:仿真利用各种成熟的动力学仿真软件,通过一定的通信手段实现与实际控制器的通信
这种联合仿真中,要注意仿真时间的同步问题!
不同的方案原理相通,与我们平常仿真实际没什么不同,只不过控制器拿到了仿真环境外,主要目的是验证我们的嵌入式系统的可靠性!能够让我们更有效的测试嵌入式控制系统,避免了由于逻辑错误导致的设备损坏,也保证了人员安全,利于产品完善和研发成本压缩~
转载地址:https://miracle.blog.csdn.net/article/details/116529543 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
感谢大佬
[***.8.128.20]2024年04月30日 16时09分26秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
Android用类继承Application的全局变量使用注意
2019-05-02
排序算法之冒泡排序
2019-05-02
算法排序之桶排序
2019-05-02
lambda表达式初探
2019-05-02
C++ Template类模板的特化(3.3节, 3.4节)
2019-05-02
第05章 函数
2019-05-02
第08章 输入和输出
2019-05-02
QT中文乱码的解
2019-05-02
netsh用法
2019-05-02
网上Qt多线程同步的一种普遍误识
2019-05-02
libcurl smtp发送邮件附件大小限制问题
2019-05-02
Qt中用QuaZip来压缩和解压缩文件
2019-05-02
第13章 Windows内存体系结构
2019-05-02
windows 和 linux 下c/c++内存分布(整理)
2019-05-02
Qt解析XML文件(QDomDocument)
2019-05-02
Qt图形视图框架
2019-05-02
Qt5中表格处理大数据量
2019-05-02
LeakCanary源码分析
2019-05-02
单例模式(Singleton)
2019-05-02
android Handler解析
2019-05-02
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311894439 位访客
访问时间: 2024-05-08 04:09:26
访问IP: 3.14.6.194
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版