Simulink生成ROS功能包的步骤总结
发布日期:2021-07-01 04:03:39
浏览次数:3
分类:技术文章
本文共 360 字,大约阅读时间需要 1 分钟。
-
step1:搭建仿真模型,注意两个问题,①ROS话题输出的信号类型是
single类型,而Simulink输出的类型是double类型,因此可使用Data Type Conversion模块实现类型转换;②连续积分器Integrator不支持代码生成,建议自己搭,如下图所示。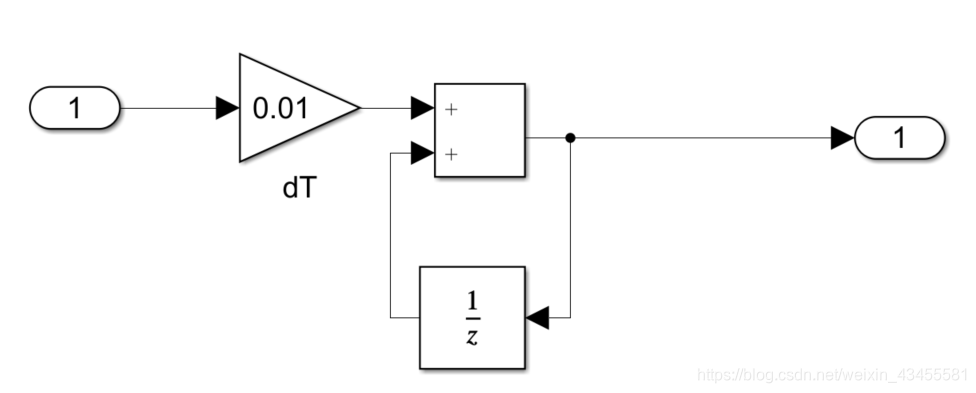
-
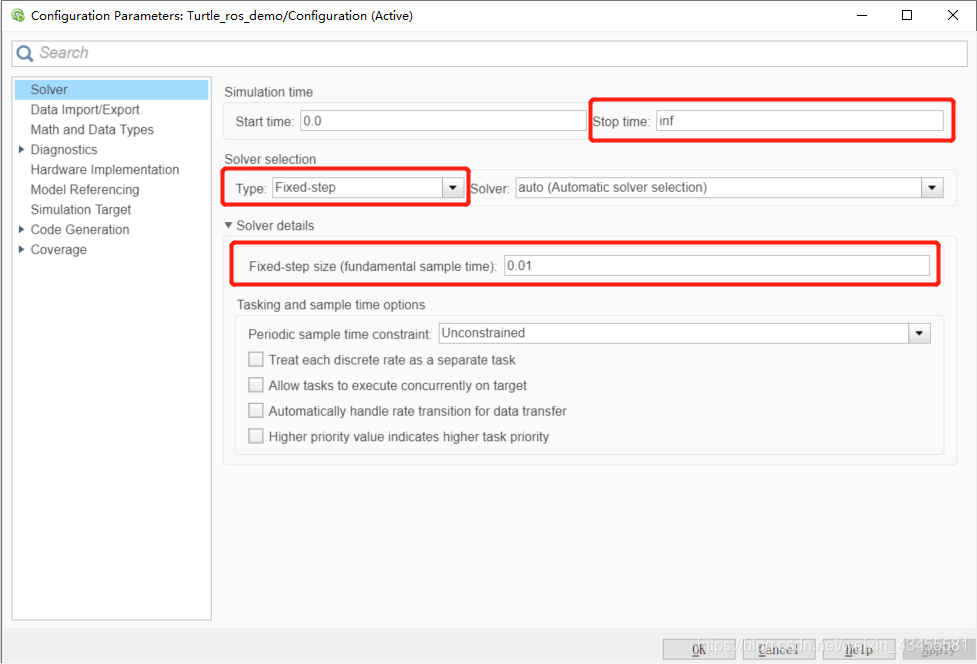
step2:设置求解器及求解步长等参数。
-
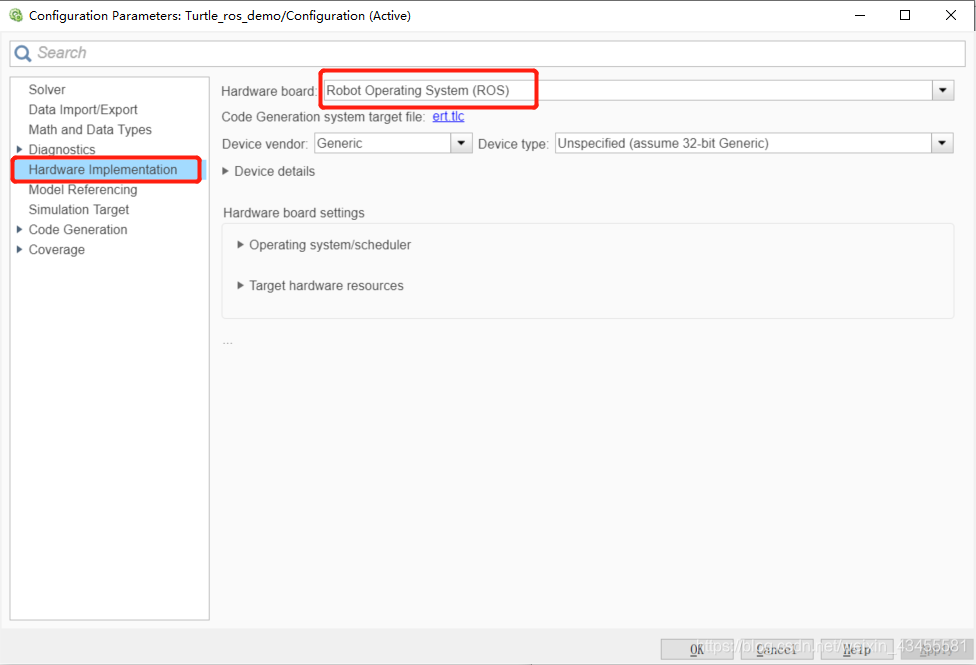
step3:生成代码
 我们只关心生成的压缩包和sh脚本,其中脚本是用来安装压缩包到工作目录的。
我们只关心生成的压缩包和sh脚本,其中脚本是用来安装压缩包到工作目录的。 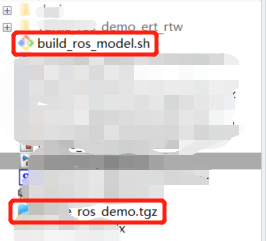
-
step4:
bash build_ros_model.sh xxxx.tgz ~/工作空间,注意不是放在src文件夹下,直接在工作空间下运行脚本即可,此时会自动编译。 -
step5:测试生成的代码,记得要
source工作空间,然后rosrun即可,编译好的结点程序在/工作空间/devel/lib目录下查看。
转载地址:https://miracle.blog.csdn.net/article/details/116527013 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
留言是一种美德,欢迎回访!
[***.207.175.100]2024年05月04日 11时42分26秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
jpa的entry审查Auditing
2019-05-02
mongdb查询笔记
2019-05-02
facebook区块链libra测试网体验
2019-05-02
Java面向对象三巨头
2019-05-02
前端学习 -- Css -- 属性选择器
2019-05-02
Python 日期和时间
2019-05-02
前端学习 -- 长度单位
2019-05-02
前端学习 -- Css -- 定义列表
2019-05-02
前端学习 -- Css -- 字体
2019-05-02
前端学习 -- 颜色
2019-05-02
前端学习 -- Css -- 字体的几个属性学习
2019-05-02
前端学习 -- Css -- 字体分类
2019-05-02
Shell脚本学习
2019-05-02
前端学习 -- Css -- 行间距
2019-05-02
前端学习 -- Css -- 文本样式
2019-05-02
前端学习 -- Css -- 盒子模式
2019-05-02
前端学习 -- Css -- 默认样式
2019-05-02
Effective Java -- 创建和销毁对象
2019-05-02
Effective Java -- 对于所有对象都通用的方法
2019-05-02
前端学习 -- Css -- 内联元素的盒模型
2019-05-02
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311859096 位访客
访问时间: 2024-05-08 01:23:14
访问IP: 18.188.66.13
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版