红外遥控模块的使用方法,以及stm32代码
 接收管是红外接收二极管VS1838B,在实际应用中要给红外接收二极管加反向偏压,它才能正常工作,亦即红外接收二极管在电路中应用时是反向运用,这样才能获得较高的灵敏度。和主控芯片具有定时器输入捕获功能的I/O引脚连接在一起:
接收管是红外接收二极管VS1838B,在实际应用中要给红外接收二极管加反向偏压,它才能正常工作,亦即红外接收二极管在电路中应用时是反向运用,这样才能获得较高的灵敏度。和主控芯片具有定时器输入捕获功能的I/O引脚连接在一起:  遥控器:
遥控器: 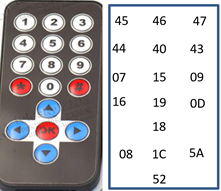
 红外通信是利用950nm近红外波段的红外线作为传递信息的媒体, 即通信信道。 发送端采用脉时调制(PPM) 方式, 将二进制数字信号调制成某一频率的脉冲序列, 并驱动红外发射管以光脉冲的形式发送出去; 接收端将接收到的光脉转换成电信号, 再经过放大、 滤波等处理后送给解调电路进行解调, 还原为二进制数字信号后输出。 简而言之, 红外通信的实质就是对二进制数字信号进行调制与解调, 以便利用红外信道进行传输, 红外通信接口就是针对红外信道的调制解调器。 特点: 红外遥控的特点是不影响周边环境、不干扰其它电器设备。由于其无法穿透墙壁,故不同房间的家用电器可使用通用的遥控器而不会产生相互干扰;电路调试简单,只要按给定电路连接无误,一般不需任何调试即可投入工作;编解码容易,可进行多路遥控。因此,红外遥控在家用电器、室内近距离(小于10米)遥控中得到了广泛的应用。
红外通信是利用950nm近红外波段的红外线作为传递信息的媒体, 即通信信道。 发送端采用脉时调制(PPM) 方式, 将二进制数字信号调制成某一频率的脉冲序列, 并驱动红外发射管以光脉冲的形式发送出去; 接收端将接收到的光脉转换成电信号, 再经过放大、 滤波等处理后送给解调电路进行解调, 还原为二进制数字信号后输出。 简而言之, 红外通信的实质就是对二进制数字信号进行调制与解调, 以便利用红外信道进行传输, 红外通信接口就是针对红外信道的调制解调器。 特点: 红外遥控的特点是不影响周边环境、不干扰其它电器设备。由于其无法穿透墙壁,故不同房间的家用电器可使用通用的遥控器而不会产生相互干扰;电路调试简单,只要按给定电路连接无误,一般不需任何调试即可投入工作;编解码容易,可进行多路遥控。因此,红外遥控在家用电器、室内近距离(小于10米)遥控中得到了广泛的应用。 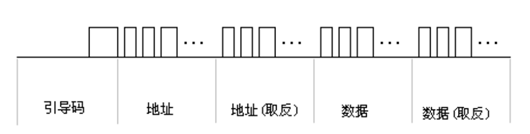 NEC 协议通过脉冲串之间的时间间隔来实现信号的调制(英文简写PPM)。逻辑“0”是由0.56ms的38KHZ载波和0.560ms的无 载波间隔组成;逻辑“1”是由0.56ms的38KHZ载波和1.68ms的无载波间隔组成;结束位是0.56ms的38K载波。
NEC 协议通过脉冲串之间的时间间隔来实现信号的调制(英文简写PPM)。逻辑“0”是由0.56ms的38KHZ载波和0.560ms的无 载波间隔组成;逻辑“1”是由0.56ms的38KHZ载波和1.68ms的无载波间隔组成;结束位是0.56ms的38K载波。
发布日期:2021-05-10 03:24:38
浏览次数:23
分类:精选文章
本文共 3616 字,大约阅读时间需要 12 分钟。
我使用的模块是stm32F103R8T6,配合STM32CudeMX实现的红外遥控串口通讯
一、 红外编码
1、实物设备
发射管,红外发光二极管,发出的是红外线而不是可见光,红外线波长为940nm左右。(在遥控器上面):
接收管是红外接收二极管VS1838B,在实际应用中要给红外接收二极管加反向偏压,它才能正常工作,亦即红外接收二极管在电路中应用时是反向运用,这样才能获得较高的灵敏度。和主控芯片具有定时器输入捕获功能的I/O引脚连接在一起: 遥控器: 2、基本原理
调制:将数据能够发送更远,并且数据的损耗在合理范围内,大致过程如下1–》2–》3。
解调:将接收到的已调数据重新恢复并获取出来,大致过程如下的3–》2–》1。 红外通信是利用950nm近红外波段的红外线作为传递信息的媒体, 即通信信道。 发送端采用脉时调制(PPM) 方式, 将二进制数字信号调制成某一频率的脉冲序列, 并驱动红外发射管以光脉冲的形式发送出去; 接收端将接收到的光脉转换成电信号, 再经过放大、 滤波等处理后送给解调电路进行解调, 还原为二进制数字信号后输出。 简而言之, 红外通信的实质就是对二进制数字信号进行调制与解调, 以便利用红外信道进行传输, 红外通信接口就是针对红外信道的调制解调器。 特点: 红外遥控的特点是不影响周边环境、不干扰其它电器设备。由于其无法穿透墙壁,故不同房间的家用电器可使用通用的遥控器而不会产生相互干扰;电路调试简单,只要按给定电路连接无误,一般不需任何调试即可投入工作;编解码容易,可进行多路遥控。因此,红外遥控在家用电器、室内近距离(小于10米)遥控中得到了广泛的应用。 3、红外编码原理
NEC编码原理(还有一种Philips RC5协议)
NEC格式的特征: 1:使用38 kHz载波频率 2:引导码间隔是9 ms + 4.5 ms 3:使用16位客户代码 4:使用8位数据代码和8位取反的数据代码 NEC编码的一帧(通常按一下遥控器按钮所发送的数据) 由引导码、 地址码及数据码组成,如下图所示, 把地址码及数据码取反的作用是加强数据的正确性。 NEC 协议通过脉冲串之间的时间间隔来实现信号的调制(英文简写PPM)。逻辑“0”是由0.56ms的38KHZ载波和0.560ms的无 载波间隔组成;逻辑“1”是由0.56ms的38KHZ载波和1.68ms的无载波间隔组成;结束位是0.56ms的38K载波。 二、红外遥控模块程序
1、红外遥控模块头文件
//红外遥控模块头文件#ifndef __IR_H#define __IR_H#include "main.h"#define IR_TIM TIM2#define MAX_DATALEN 5typedef struct{ uint8_t mode; uint8_t Ir_Data[MAX_DATALEN]; uint16_t Ir_Length;}IR_DATA_TypeDef;extern uint8_t IR_code;uint8_t Ir_RecvAnalysis(void);#endif 2、红外遥控模块函数实现代码
//红外遥控模块函数实现代码#include "ir.h"#define RCKeyNum 17#define RCIRLength 4uint8_t IR_key[17] ="123456789*0#+LOR-";uint8_t RemoteControl_Table[RCKeyNum][RCIRLength] = { { 0x00,0xFF,0x45,0xBA}, { 0x00,0xFF,0x46,0xB9}, { 0x00,0xFF,0x47,0xB8}, { 0x00,0xFF,0x44,0xBB}, { 0x00,0xFF,0x40,0xBF}, { 0x00,0xFF,0x43,0xBC}, { 0x00,0xFF,0x07,0xF8}, { 0x00,0xFF,0x15,0xEA}, { 0x00,0xFF,0x09,0xF6}, { 0x00,0xFF,0x16,0xE9}, { 0x00,0xFF,0x19,0xE6}, { 0x00,0xFF,0x0D,0xF2}, { 0x00,0xFF,0x18,0xE7}, { 0x00,0xFF,0x08,0xF7}, { 0x00,0xFF,0x1C,0xE3}, { 0x00,0xFF,0x5A,0xA5}, { 0x00,0xFF,0x52,0xAD}, };uint16_t ir_buf[1024] = { 0};uint16_t ir_count = 0;uint16_t ir_flag = 0; void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ if(htim==&htim2) { ir_flag = 1; Ir_RecvAnalysis(); //接收红外信号 }}void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){ if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2 ) { if(ir_flag == 0) { ir_buf[ir_count++] = IR_TIM->CCR2; __HAL_TIM_SET_COUNTER(&htim2,0); IR_TIM->CCER ^= (1<<5); } }}//判断数据范围函数//数据在给定的范围之内:返回1//数据在给定的范围之外:返回0//time1:待判断时间//time2:标准时间uint8_t Time_Range(uint16_t time1, uint16_t time2, uint16_t range1, uint16_t range2){ if((time1 > (time2-range1)) && (time1 < (time2+range2))) return 1; else return 0;}//校验遥控器按键//正确,返回遥控器按键所对应的数组行号//错误 -1 按键地址错误 不是这个遥控器//错误 -2 地址正确,但是当前版本遥控器没有这个按键值int Check_RemoteControlKey(uint8_t *buff){ uint8_t i=0; int retn;// if(buff[0] != RemoteControl_Table[0][0] || buff[1] != RemoteControl_Table[0][1]) if((buff[0]!=0x00) || (buff[1]!=0xFF)) retn = -1;//地址错误 for(i=0; i =RCKeyNum) retn = -2; return retn;}//返回值 //0 解析成功//1 没有接收完成//2 引导码错误//3 前半段数据错误//4 后半段数据错误IR_DATA_TypeDef ir = { 0};uint8_t IR_code = 0XFF;uint8_t Ir_RecvAnalysis(void){ uint16_t i = 0; uint8_t err; if(ir_flag == 0) return 1;// for(i=0; i =0) { IR_code = IR_key[Check_RemoteControlKey(ir.Ir_Data)]; memset(ir_buf,0,sizeof(ir_buf)); memset(ir.Ir_Data,0,sizeof(ir.Ir_Data)); ir.Ir_Length = 0; ir_count = 0; ir_flag = 0; return 0; } error: memset(ir_buf,0,sizeof(ir_buf)); memset(ir.Ir_Data,0,sizeof(ir.Ir_Data)); ir.Ir_Length = 0; ir_count = 0; ir_flag = 0;// TIM_Cmd(TIM2,ENABLE); HAL_TIM_Base_Start_IT(&htim2); if(err) return err; else return 0;} 发表评论
最新留言
网站不错 人气很旺了 加油
[***.192.178.218]2025年04月17日 03时53分16秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
我用wxPython搭建GUI量化系统之wx.grid实现excel功能
2021-05-10
我用wxPython搭建GUI量化系统之wx.Toolbar实现工具栏
2021-05-10
我用wxPython搭建GUI量化系统之wx.TextCtrl实现文本框
2021-05-10
我用wxPython搭建GUI量化系统之最小架构的运行
2021-05-10
我用wxPython搭建GUI量化系统之Sizer布局管理与页面切换
2021-05-10
我用wxPython搭建GUI量化系统之多只股票走势对比界面
2021-05-10
我用wxPython搭建GUI量化系统之Pandas特性的财务选股工具
2021-05-10
我用wxPython搭建GUI量化系统之财务选股工具添加日历和排序
2021-05-10
搭建量化系统|wxPython布局管理实现多只股票走势对比界面
2021-05-10
2019年达观杯文本智能信息抽取挑战赛 四到十名队伍分享
2021-05-10
一文掌握Python正则表达式
2021-05-10
selenium+python之切换窗口
2021-05-10
Unknown database ‘modd‘
2021-05-10
重载和重写的区别:
2021-05-10
finally,final,finalize() 的区别
2021-05-10
搭建Vue项目步骤
2021-05-10
docker镜像命令
2021-05-10
docker容器命令
2021-05-10
CentOS7使用keepalive实现nginx的高可用
2021-05-10
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 460898171 位访客