本文共 1693 字,大约阅读时间需要 5 分钟。
引入激光传感器的原因:摄像机测距并不是那么准确。
激光雷达的原理(TOF:time of fly):激光雷达的发射器发射出一束激光,激光光束遇到物体漫反射,返回激光接收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以2,即可计算出发射器与物体的距离。
激光雷达的分类:
一、单线激光雷达:
目前成本最低的激光雷达。成本低,意味着量产的可能性大。
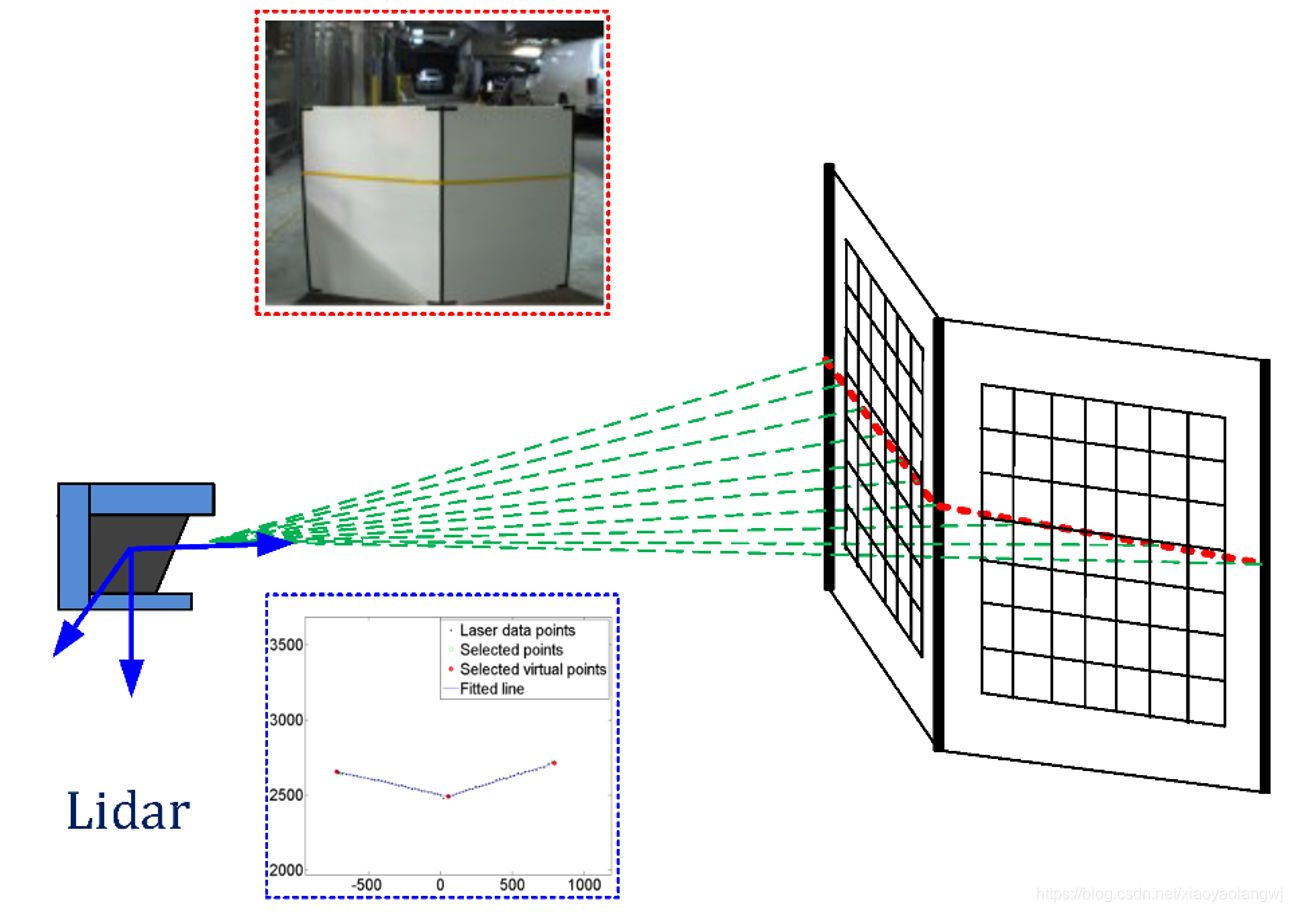
单束激光发射器在激光雷达内部进行匀速的旋转,每旋转一个小角度即发射一次激光,轮巡一定的角度后,就生成了一帧完整的数据。
因此,单线激光雷达的数据可以看做是同一高度的一排点阵。
单线激光雷达的数据缺少一个维度,只能描述线状信息,无法描述面。如上图,可以知道激光雷达的面前有一块纸板,并且知道这块纸板相对激光雷达的距离,但是这块纸板的高度信息无从得知。
二、四线激光雷达:
四线激光雷达将四个激光发射器进行轮询,一个轮询周期后,得到一帧的激光点云数据。四条点云数据可以组成面状信息,这样就能够获取障碍物的高度信息。
根据单帧的点云坐标可得到障碍物的距离信息。
根据多帧的点云的坐标,对距离信息做微分处理,可得到障碍物的速度信息。
实际应用时,在购买激光雷达的产品后,其供应商也会提供配套的软件开发套件(SDK,Software Development Kit),这些软件开发套件能很方便地让使用者得到精准的点云数据,而且为了方便自动驾驶的开发,甚至会直接输出已经处理好的障碍物结果。
三、16/32/64线激光雷达
16/32/64线的激光雷达的感知范围为360°,为了最大化地发挥他们的优势,常被安装在无人车的顶部。
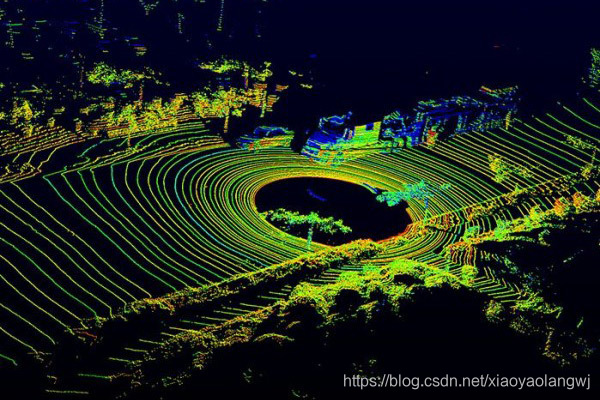
图中的每一个圆圈都是一个激光束产生的数据,激光雷达的线束越多,对物体的检测效果越好。比如64线的激光雷达产生的数据,将会更容易检测到路边的马路牙子。
16/32/64线的激光雷达只能提供原始的点云信号,没有对应的SDK直接输出障碍物结果。因此各大自动驾驶公司都在点云数据基础上,自行研究算法完成无人车的感知工作。
激光雷达的数据
以N线激光雷达为例来讲解点云的数据结构:
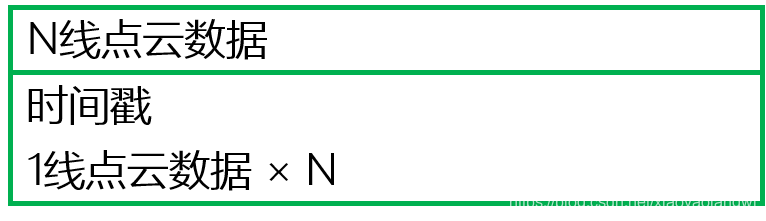
每一线点云的数据结构是由点云的数量和每一个点云的数据结构组成。由于激光雷达的数据采集频率和单线的点云数量都是可以设置的,因此1线点云数据中需要包含点云数量这个信息。
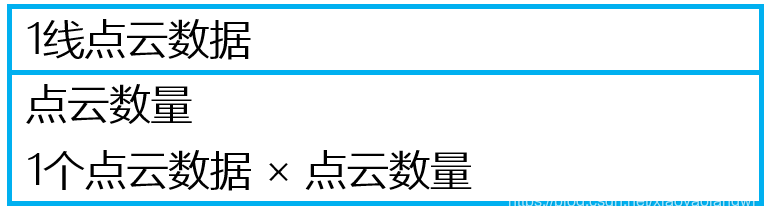
最底层的是单个点云的数据结构。点的表达既可以使用theta/r的极坐标表示,也可以使用x/y/z的3维坐标表示:
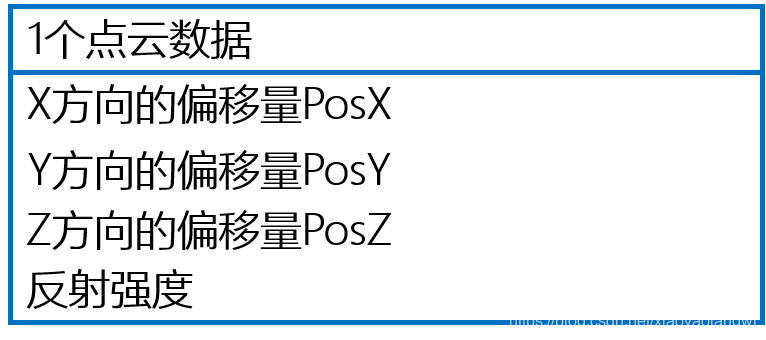
每个点云除了坐标外,还有一个很重要的元素,那就是激光的反射强度。激光在不同材料上的反射强度是不一样的。以3维坐标点的表示方法为例,单个点云的数据结构如上。X/Y/Z方向的偏移量是以激光雷达的安装位置作为原点。
激光雷达能做什么?
激光雷达点云数据的一般处理方式是:数据预处理(坐标转换,去噪声等),聚类(根据点云距离或反射强度),提取聚类后的特征,根据特征进行分类等后处理工作。
1、障碍物检测与分割:
利用高精度地图限定感兴趣区域(ROI,Region of Interest)后,基于全卷积深度神经网络学习点云特征并预测障碍物的相关属性,得到前景障碍物检测与分割。
2、可通行空间检测:
利用高精度地图限定ROI后,可以对ROI内部(比如可行驶道路和交叉口)的点云的高度及连续性信息进行判断点云处是否可通行。
3、高精度电子地图制图与定位:
利用多线激光雷达的点云信息与地图采集车载组合惯导的信息,进行高精地图制作。自动驾驶汽车利用激光点云信息与高精度地图匹配,以此实现高精度定位。
4、障碍物轨迹预测:
根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人车规划(避障、换道、超车等)的判断依据。
当前人工智能的算法还不够成熟,纯视觉传感器的无人驾驶方案在安全性上还存在较多问题,因此现阶段的无人车的开发还离不开激光雷达。强如Google,目前不也还没有脱离激光雷达的自动驾驶方案么。
成本是激光雷达普及所遇到的最大问题。毕竟一款比车还贵的传感器是车企无法接受的。
好文推荐:
1、
2、
3、
4、
5、
6、
发表评论
最新留言
关于作者
