本文共 1370 字,大约阅读时间需要 4 分钟。
Apache Nifi 概念
1.1, NIFI简介
Apache NiFi 是一个易于使用,功能强大且可靠的系统,用于处理和分发数据。可以自动化管理系统间的数据流。它支持高度可配置的指示图的数据路由、转换和系统中介逻辑,支持从多种数据源动态拉取数据。NiFi原来是NSA的一个项目,目前已经代码开源,是Apache基金会的顶级项目之一。
NiFi是基于Java的,使用Maven支持包的构建管理。 NiFi基于Web方式工作,后台在服务器上进行调度。用户可以将数据处理定义为一个流程,然后进行处理,后台具有数据处理引擎、任务调度等组件。
1.2, NIFI核心概念
FlowFile:表示通过系统移动的每个对象,包含数据流的基本属性
FlowFile Processor(处理器):负责实际对数据流执行工作 Connection(连接线):负责不同处理器之间的连接,是数据的有界缓冲区 Flow Controller(流量控制器):管理进程使用的线程及其分配 Process Group(过程组):进程组是一组特定的进程及其连接,允许组合其他组件创建新组件1.3, NIFI构架
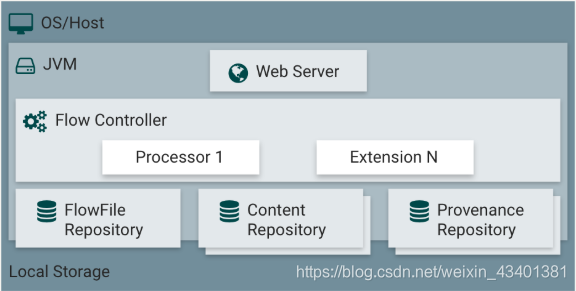
NiFi在主机操作系统上的JVM内执行。JVM上的NiFi的主要组件如下:
1.3.1, 网络服务器
Web服务器的目的是托管NiFi的基于HTTP的命令和控制API。
1.3.2, 流控制器
流控制器是操作的大脑。它提供用于扩展程序运行的线程,并管理扩展程序接收资源以执行的时间表。
扩展
有各种类型的NiFi扩展在其他文档中描述。这里的关键是扩展在JVM中运行和执行。
1.3.4, FlowFile存储库
FlowFile存储库是NiFi跟踪目前在流程中活动的给定FlowFile的知识状态。存储库
实现是可插拔的。默认方法是位于指定磁盘分区上的持久写入前端日志。
1.3.5, 内容存储库
Content Repository是给定FlowFile的实际内容字节。存储库的实现是可插拔的。默认方法是一个相当简单的机制,它将数据块存储在文件系统中。可以指定多个文件系统存储位置,以便获得不同的物理分区,以减少任何单个卷上的争用。
1.3.6, 源头存储库
Provenance Repository是存储所有来源的事件数据的地方。存储库构造是可插入的,默认实现是使用一个或多个物理磁盘卷。在每个位置内,事件数据被索引和可搜索。
作为功能强大的数据处理和分发组件,sNiFi自然原生支持集群部署方式(推荐部署方式)。NiFi集群部署模式如下图:
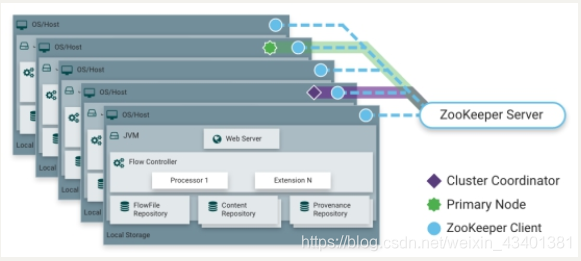 集群模式下,NiFi集群中的每个节点对数据执行相同的任务,但是每个节点都在不同的数据集上进行操作。和大部分大数据组件一样,NiFi集群使用Apache ZooKeeper提供协调服务。 Apache ZooKeeper选择一个NiFi节点作为集群协调器,故障转移由ZooKeeper自动处理。 所有集群节点向集群协调器报告心跳和状态信息。集群协调器负责节点的断开和连接。 此外,ZooKeeper会为每个集群选举一个节点作为集群主节点。 作为DataFlow管理器,您可以通过任何节点的用户界面(UI)与NiFi集群进行交互。您所做的任何更改都会同步到集群中的所有节点,从而允许多个入口点。
集群模式下,NiFi集群中的每个节点对数据执行相同的任务,但是每个节点都在不同的数据集上进行操作。和大部分大数据组件一样,NiFi集群使用Apache ZooKeeper提供协调服务。 Apache ZooKeeper选择一个NiFi节点作为集群协调器,故障转移由ZooKeeper自动处理。 所有集群节点向集群协调器报告心跳和状态信息。集群协调器负责节点的断开和连接。 此外,ZooKeeper会为每个集群选举一个节点作为集群主节点。 作为DataFlow管理器,您可以通过任何节点的用户界面(UI)与NiFi集群进行交互。您所做的任何更改都会同步到集群中的所有节点,从而允许多个入口点。 未完下期再续…
转载地址:https://blog.csdn.net/weixin_43401381/article/details/104278037 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
