Cesium中的相机—YawPitchRoll
发布日期:2021-06-30 13:52:51
浏览次数:2
分类:技术文章
本文共 123 字,大约阅读时间需要 1 分钟。
原博文地址:
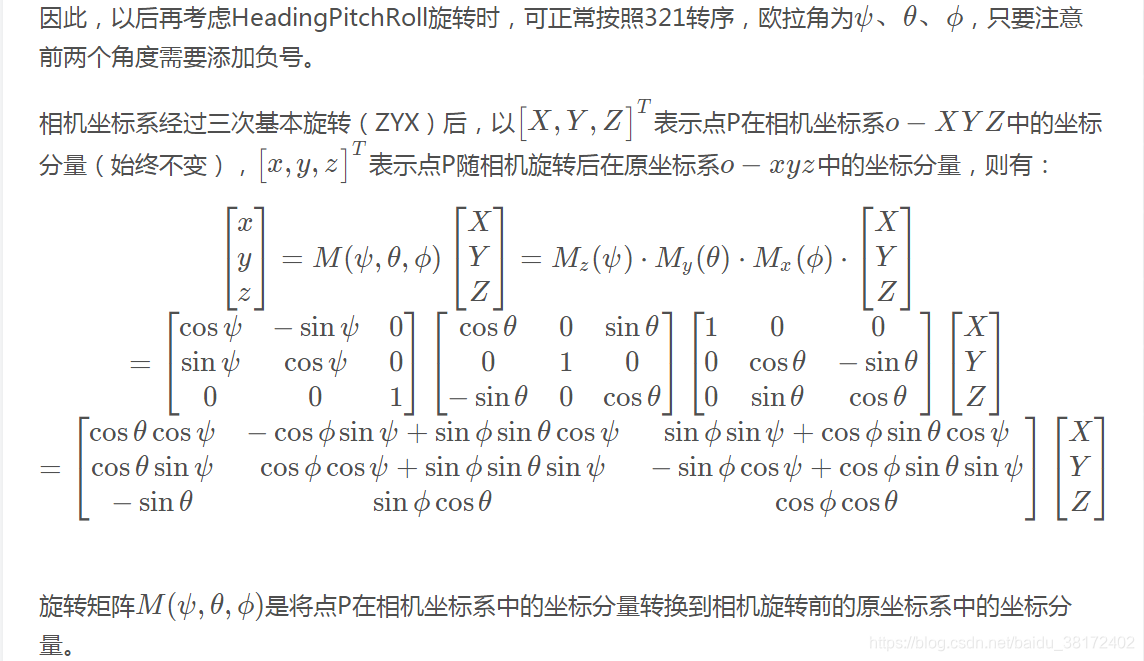
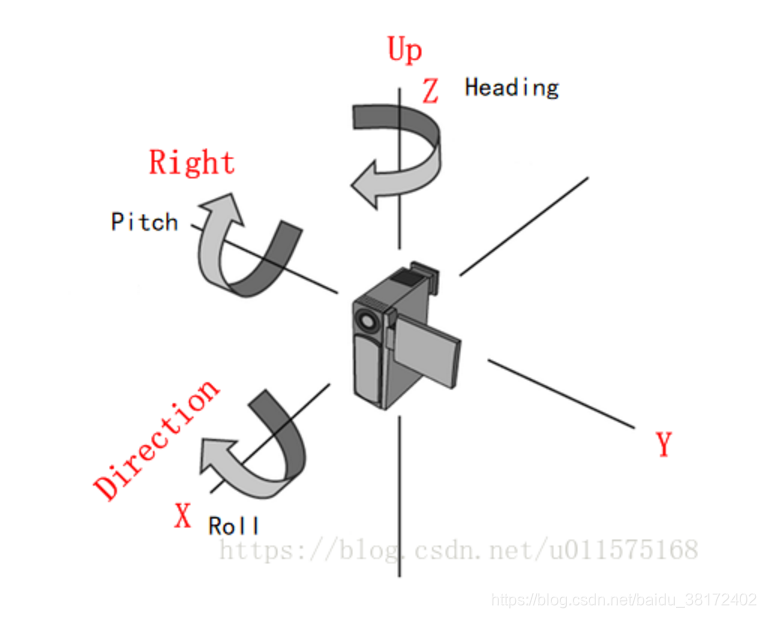
以正前方为X轴,以左手坐标系建立O_XYZ坐标系。Yaw、Pitch、Roll建立坐标系,从基准正前方出发,相机以向上和向右旋转为正。
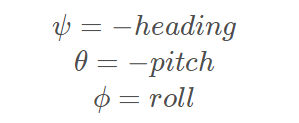
由于求取旋转矩阵是,坐标轴之间的旋转都是以逆时针进行的,所以实际角度有如下关系:
转载地址:https://jensen-lee.blog.csdn.net/article/details/85113632 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
留言是一种美德,欢迎回访!
[***.207.175.100]2024年04月15日 00时38分17秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
python学习笔记
2019-05-01
Ant内置任务之replace
2019-05-01
Ant内置任务之tstamp
2019-05-01
Ant内置任务之whichresource
2019-05-01
Ant内置任务之touch
2019-05-01
Ant内置任务之truncate
2019-05-01
Ant内置任务之sync
2019-05-01
Ant内置任务之symlink
2019-05-01
Ant内置任务之sound
2019-05-01
Ant内置任务之typedef
2019-05-01
jface databinding:部分实现POJO对象的监测
2019-05-01
java 8:只取年月日的java.util.Date(时分秒清零)对象
2019-05-01
javabean:boolean和Boolean类型的getter方法名是有区别的
2019-05-01
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311461500 位访客
访问时间: 2024-05-06 18:38:17
访问IP: 18.117.183.172
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版