本文共 2830 字,大约阅读时间需要 9 分钟。
小样本条件下工业无损检测-X光损失检测
- 小样本:数据量不足,没有足够的数据支持;
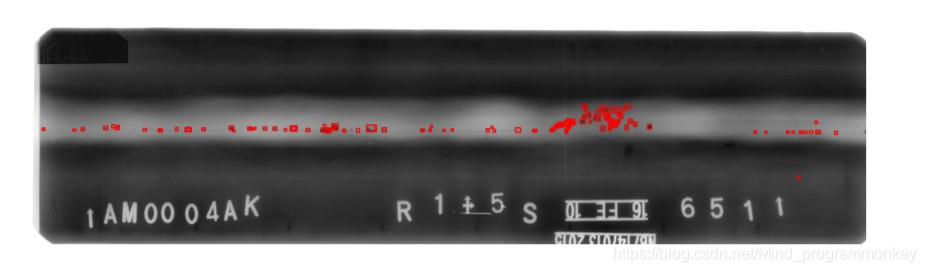
- X光损失检测:作为工业工业无损检测技术中的。利用X光射线持续照射待检测物体一段时间,并且用胶片记录传过待检测物体的各个部位的X光的强度。穿透强度高的地方,对应的胶片部分的灰度值比较大,比较明亮;穿透强度较弱的地方,对应的胶片部分的灰度值比较小,相对灰暗。通过观察X光胶片桑的灰度值变化可以推断出待检测物体内部结构是否符合生产的预期。
研究方法
为解决小样本数据下工业无损检测图像中的损伤定位问题,提出一种结合主动学习的多尺度多特征融合的损失检测方法,并结合目标识别的方法,减少基于滑动窗口的分类模型中带来的误判率,进一步提升模型的损失定位效果。
- 1.主动学习:通过主动学习的策略,在不影响模型定位准确率的情况下,降低模型训练所需要的标注成本。
- 2.多特征:通过特征增强的方法增强图像中的损伤特征,并且通过聚类的方法将焊缝的X光图像中的焊缝区域以及钢铁区域分开,并将上述多种特征融合,得到信息更加丰富的多特征融合数据。
- 3.多尺度判别:利用更小的定位框对损失进行定位,提升模型定位损失的准确率。
主动学习框架下的 多尺度多特征损失定位方法
通过改进CLAHE方法,提出了G-CLAHE方法,用于增强X光损失图像中梯度、对比度特征以及解决灰度值分布不均匀问题。其次通过聚类的方式提取X光影像中的焊缝的位置信息,通过这种方法将人工检验损伤的经验加入到模型之中。而后将原始图像、G-CLAHE特征增强结果与聚类结果结合起来,形成信息更加丰富的多特征融合的三通道数据,解决了由于数据维度不同而不能使用ImageNet对模型进行预训练的问题,同时由于数据特征更加丰富,进一步提升了模型的分类效果。另一方面,本文提出了多尺度判别模型,让模型获取到更多的空间信息的同时使用较小的定位框对损伤进行定位,提高了像素级别的损伤检测的性能。最后结合主动学习的方法,在保证损伤定位准确率的同时,减少了大量的数据标注成本。
1.多特征融合方法

X光图像为单通道的TIFF格式数据,而目前常用的图像数据集中的数据位RGB三通道的格式。已有的方法通常是将每张单通道的图像数据复制为三份,合并成一个三通道的图像数据。这里利用非线性灰度增强改进了CLAHE(限制对比度的自适应直方图均衡方法),得到G-CLAHE方法,另一方面,通过聚类方法,快速定位出目标区域(焊缝区域),得到焊缝定位信息,最后,将G-CLAHE的特征增强与损失定位信息作为额外的两个通道与原始的单通道数据合并成一个三通道的图像数据。
a.G-CLAHE方法
图像增强处理技术,是指按照某种特定的需要突出一幅图像中的某些信息,同时,削弱或去除某些不需要的信息的处理方法。而利用直方图统计的结果,通过使图像的直方图均衡的方法称为直方图均衡化。直方图均衡化可以达到增强图像显示效果的作用。其基本思想是把原始图像的直方图变换成均匀分布的形式,这样就增加了像素灰度值的动态范围,从而达到增强图像整体对比度的效果。
通过该直方图统计,可以观察出,图像中各种亮度所占的比例大都分布不均匀,设法增加在直方图统计中所占比例高的像素和其它占的比例少的像素之间的亮度差,可以提高图像的显示效果。简单来说,直方图增强的方法就是压缩直方图中比例少的像素所占用的灰度范围,多出来的灰度空间按照比例分配给直方图中比例高的像素使用。
而G-CLAHE方法是在CLAHE方法上增加了自适应性灰度拉伸,将CLAHE方法改进成了G-CLAHE方法。灰度拉伸方法如图所示。


b.聚类方法
这里采用K-Means方法,K-Means聚类算法首先根据人工设定的k值,随机选定k个聚类中心。然后计算每个对象与每个子群中心之间的距离,并将每个对象分配给距离它最近的集群中心。每个聚类中心和分配给它的对象作为一个聚类。分配完对象之后,根据现有的集群中所有对象计算每一个集群的聚类中心。一直重复该过程直到满足终止条件。

2.多尺度判别模型

使用滑动窗口的策略结合深度学习模型构建的分类器来进行损伤的定位。利用滑动窗口在原始数据上滑动,在滑动过程中判别每次滑动窗口所覆盖的数据是否包含损伤。而传统的滑动窗口策略难以保证检测质量。
因此,这里使用多尺度判别模型。该模型可以利用不同尺度的分类器对待检测区域进行判别,以确保神经网络可以在获得更多的空间信息的同时,利用更加细粒度的矩形框定位损伤。
使用S1 * S1大小的训练数据集对Location模型进行迁移学习的重新训练。然后利用S2 * S2像素大小对Deatil模块进行重新训练。将Location模块与Detail模块利用各自的数据分别训练过后,将两个模块以上图所示集成到多尺度模型框架中,进行联合训练。
3.主动学习方法
将多尺度多特征的损伤定位方法与主动学习的策略相结合,在Location模块的训练过程中不使用全部的训练数据,而是使用主动学习的方式,通过训练多个相同结构的分类器,以集成学习的方式组成一个更加强大的Location分类器模块。在不影响模型检测性能的前提下,尽可能的减少数据标注的相关成本。

Location 网络由 m 个子分类器 MC = (C1,C2, · · · ,Cm) 组成,其中每个子分类器 Ci 都可以独自完成 X 光图像的分类任务。当一个样本 I 输入到 Location 网络中之后,所有子分类器 MC = (C1,C2, · · · ,Cm) 均将根据自身的参数对输入数据进行计算并且得到相应的分类结果 MR = (R1, R2, · · · , Rm) ,由于本文中的任务是对每个样本进行有无损伤的二分类,所以其中每一个子分类计算结果 Ri 均是一个维度为1且长度为2的向 Ri = (R1i, R2i) ,其中 R1i 表示第 i 个分类器
认为该样本不包含损伤的置信度, R2i 表示第i个分类器认为该样本包含损伤的置信度。在训练过程中,将通过各个子分类器的分类结果 MR = (R1, R2, · · · , Rm) 以及样本选择策略来选择待标注的样本。在使用过程中,将通过各个子分类器的分类结果 MR = (R1, R2, · · · , Rm) 结合集成学习的投票策略来做出最终的分类决策。基于目标检测改进的损失定位模型
结合目标识别的Yolo方法,对上述的模型做进一步的提升。

首先采用多特征融合方法将原始的单通道图像进行特征增强,得到多特征融合数据,然后根据滑动窗口的策略,利用步长为S/2,大小为 S * S 的窗口在多特征融合数据上进行采样,将采样结果及其在原始图像上的相对位置输入到LOcation模型中.Location模型通过集成学习的方式,对输入的S * S的图像是否包含损伤进行判别,如果其中包含损伤,则调用Detail模块中的YOLO网络对其中的损伤进行具体的定位。
转载地址:https://codingchaozhang.blog.csdn.net/article/details/104236317 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
