卡尔曼_卡尔曼估计两步法
![]()
![]()
![]() 。
。 ![]()
![]()
![]() 还是未知的,因此我们需要把它表示出来。
还是未知的,因此我们需要把它表示出来。 ![]()
![]()
![]()
![]()
![]()
![]()
![]() ,而
,而 ![]() 是作用到
是作用到 ![]() 上的,所以
上的,所以 ![]() 和
和 ![]() 是相互独立的。因为相互独立,所以相乘的期望等于期望的相乘
是相互独立的。因为相互独立,所以相乘的期望等于期望的相乘 ![]()
![]()
![]() (1)利用系统模型对状态变量进行递推估计
(1)利用系统模型对状态变量进行递推估计 ![]() (2)对协方差矩阵进行估计
(2)对协方差矩阵进行估计 ![]() (3)计算卡尔曼增益
(3)计算卡尔曼增益 ![]() (4) 数据融合即对状态的估计
(4) 数据融合即对状态的估计 ![]() (5)更新协方差矩阵用于下一次的预测
(5)更新协方差矩阵用于下一次的预测 ![]() ,它就能递推估计了。记住核心思想无非是: 数据融合、预测校正。
,它就能递推估计了。记住核心思想无非是: 数据融合、预测校正。
![]()
![]()
![]()
![]()
![]()
发布日期:2021-06-24 15:58:58
浏览次数:2
分类:技术文章
本文共 612 字,大约阅读时间需要 2 分钟。
在上一篇文章中手把手推导了一遍卡尔曼增益,不熟悉的小伙伴可以看
养生的控制人:卡尔曼增益推导zhuanlan.zhihu.com 这里再回顾一下重点。
问题重述
假设真实系统为
其中
我们对系统状态的估计(数据融合)为
其中卡曼尔增益为
我们可以看到卡尔曼增益中的估计协方差矩阵
估计协方差矩阵推导
根据定义
带入真实系统模型和状态估计的模型
再带入估计协方差矩阵的表达式
把转置放进去
把括号打开
由于四项之间是线性相加的,可以把期望的运算放进去,等于每一项的期望。
注意到
因此估计的协方差矩阵剩下两项
有了这个表达式后,我们就可以用卡尔曼滤波器来估计状态了!
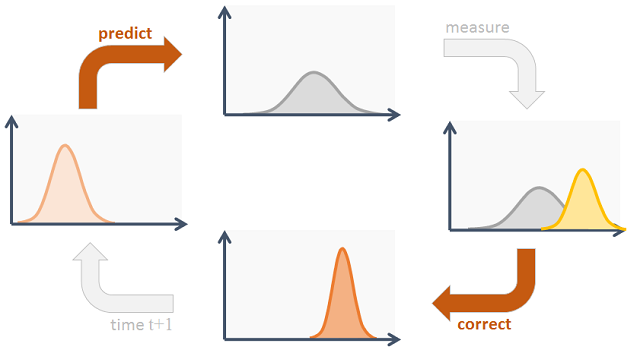
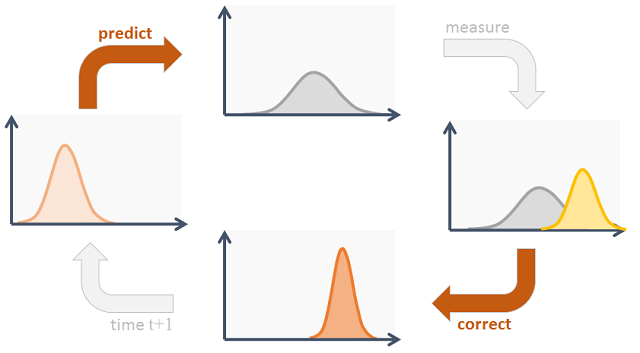
卡尔曼滤波器两步法
目前为止卡尔曼增益中各项都是已知的了,因此可以用于估计了,卡尔曼滤波分为两个步骤:预测和校正。
Step1. 预测
Step2. 校正
至此,卡尔曼滤波(估计器)就推导完毕了,给定初值
公式(5)的推导
在上一篇文章中我们推导得到协方差矩阵的表达式为
合并同类项
带入卡尔曼增益
转载地址:https://blog.csdn.net/weixin_33701632/article/details/112582638 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
表示我来过!
[***.240.166.169]2024年04月19日 14时22分16秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
年薪百万是种怎样的体验
2019-04-28
大家赚点小钱吧
2019-04-28
推荐一些优质原创公众号
2019-04-28
带大家薅点羊毛
2019-04-28
程序员的黑砖窑,东南亚博彩骗局详解
2019-04-28
误删了数据库,我只能跑路么?
2019-04-28
给创业者们推荐一个好的工具
2019-04-28
#define的高级用法
2019-04-28
Arm推出嵌入式CPU的客制化指令
2019-04-28
【RT-Thread】线程的基本知识
2019-04-28
物联网操作系统RT-Thread免费12城巡回培训开始啦
2019-04-28
电路中0欧电阻的作用
2021-07-01
什么是STM32Trust?ST最新发布了一种支持STM32的SMI技术
2021-07-01
变压器的这些冷知识,你知道吗?
2021-07-01
低EMI DC/DC变换器PCB设计
2019-04-28
精选汇总 | 硬件、电子、电路等文章
2019-04-28
一款免费、炫酷的GUI:AWTK
2019-04-28
精选汇总 | 目录 | 搜索
2019-04-28
操作系统µC/OS的故事,最终Micrium被Silicon Labs收购
2019-04-28
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 308880339 位访客
访问时间: 2024-04-29 07:39:04
访问IP: 13.58.121.131
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版