本文共 5786 字,大约阅读时间需要 19 分钟。
目录
4 ROS通信架构
Node:
在ROS的世界里,最小的进程单元就是节点(node)。一个软件包里可以有多个可执行文件,可执行文件在运行之后就成了一个进程(process),这个进程在ROS中就叫做节点。 从程
序角度来说,node就是一个可执行文件(通常为C++编译生成的可执行文件、Python脚本)
被执行,加载到了内存之中;从功能角度来说,通常一个node负责者机器人的某一个单独的
功能。由于机器人的功能模块非常复杂,我们往往不会把所有功能都集中到一个node上,而
会采用分布式的方式。例如有一个node来控制底盘轮子的运动,有一个node驱动摄像头获取图像,有一个node驱动激光雷达,有一个node根据传感器信息进行路径规划……。
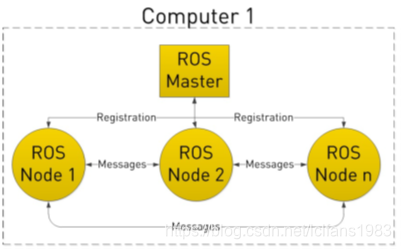
Master:
master在整个网络通信架构里相当于管理中心,管理着各个node。node首先在master处进行注册,之后master会将该node纳入整个ROS程序中。node之间的通信也是先由master进行“牵线”,才能两两的进行点对点通信。当ROS程序启动时,第一步首先启动master,由节点管理器处理依次启动node。
4.1 启动master和node
4.1.1启动master : roscore
启动ROS时,首先输入命令 roscore 启动master:
$ roscore
此时ROS master启动,同时启动的还有 rosout 和 parameter server ,其中 rosout 是负责日
志输出的一个节点,其作用是告知用户当前系统的状态,包括输出系统的error、warning等
等,并且将log记录于日志文件中; parameter server 即是参数服务器,它并不是一个node,
而是存储参数配置的一个服务器。每一次我们运行ROS的节点前,都需要把master启动起来,这样才能够让节点启动和注册。
4.1.2 启动node : rosrun, roslaunch
可以用rosrun, roslaunch
rosrun命令的详细用法如下:
$ rosrun [--prefix cmd] [--debug] pkg_name node_name [ARGS]
rosrun将会寻找PACKAGE下的名为EXECUTABLE的可执行程序,将可选参数ARGS传入。
roslaunch命令:
roslaunch pkg_name file_name.launch
能一次性启动master和多个node. roslaunch命令首先会自动进行检测系统的roscore有没有运行,也即是确认节点管理器是否在运行状态中,如果master没有启动,那么roslaunch就会首先启动master,然后再按照launch的规则执行。
4.1.3 rosnode命令
- rosnode list 列出当前运行的node信息
- rosnode info node_name 显示出node的详细信息
- rosnode kill node_name 结束某个node
- rosnode ping 测试连接节点
- rosnode machine 列出在特定机器或列表机器上运行的节点
- rosnode cleanup 清除不可到达节点的注册信息
rosnode help 来查看 rosnode 命令的用法。
4.2 ROS的通信方式
ROS的通信方式是ROS最为核心的概念,ROS的通信方式有以下四种:
- Topic 主题
- Service 服务
- Parameter Service 参数服务器
- Actionlib 动作库
4.2.1 Topic
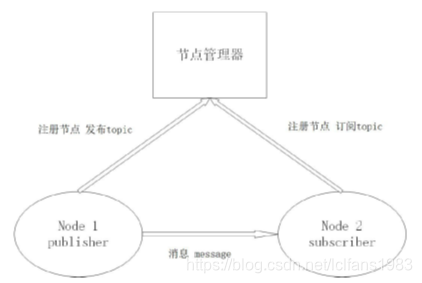
ROS中的通信方式中,topic是常用的一种。对于实时性、周期性的消息,使用topic来传输是最佳的选择。topic是一种点对点的单向通信方式,这里的“点”指的是node,也就是说node之间可以通过topic方式来传递信息。topic要经历下面几步的初始化过程:首先,publisher节点和subscriber节点都要到节点管理器进行注册,然后publisher会发布topic,subscriber在master的指挥下会订阅该topic,从而建立起sub-pub之间的通信。注意整个过程是单向的。Subscriber接收消息会进行处理,一般这个过程叫做回调(Callback)。所谓回调就是提前定义好了一个处理函数(写在代码中),当有消息来就会触发这个处理函数,函数会对消息进行处理。
topic通信是一种单向异步的通信方式。
其结构示意图如下所示;
4.2.1.1 rostopic 命令:
- rostopic list 列出当前所有的topic
- rostopic info topic_name 显示某个topic的属性信息
- rostopic echo topic_name 显示某个topic的内容
- rostopic pub topic_name ... 向某个topic发布内容
- rostopic bw topic_name 查看某个topic的带宽
- rostopic hz topic_name 查看某个topic的频率
- rostopic find topic_type 查找某个类型的topic
- rostopic type topic_name 查看某个topic的类型(msg)
4.2.1.2 msg文件
Message是topic内容的数据类型,也称之为topic的格式标准。定义在以.msg为后缀的文件中。
基本的msg数据类型包括bool、int8、int16、int32、int64(以及uint)、float、float64、string、time、duration、header、可变长数组array[]、固定长度数组array[C]。
我们用一个具体的msg来了解,例如msg sensor_msg/image ,位置存放在 sensor_msgs/msg/image.msg 里,它的结构如下:
std_msg/Header header
uint32 seq
time stamp
string frame_id
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
4.2.1.3 rosmsg 命令:
- rosmsg list 列出系统上所有的msg
- rosmsg show msg_name 显示某个msg的内容
4.2.2 Service
Service通信是双向的,它不仅可以发送消息,同时还会有反馈。所以service包括两部分,一部分是请求方(Clinet),另一部分是应答方/服务提供方(Server)。这时请求方(Client)就会发送一个request,要等待server处理,反馈回一个reply,这样通过类似“请求-应答”的机制完成整个服务通信。
这种通信方式的示意图如下:Node B是server(应答方),提供了一个服务的接口,叫做 /Service ,我们一般都会用string类型来指定service的名称,类似于topic。Node A向Node B发起了请求,经过处理后得到了反馈。

Service是同步通信方式,所谓同步就是说,此时Node A发布请求后会在原地等待reply,直到
Node B处理完了请求并且完成了reply,Node A才会继续执行。Node A等待过程中,是处于
阻塞状态的通信。这样的通信模型没有频繁的消息传递,没有冲突与高系统资源的占用,只有接受请求才执行服务,简单而且高效。
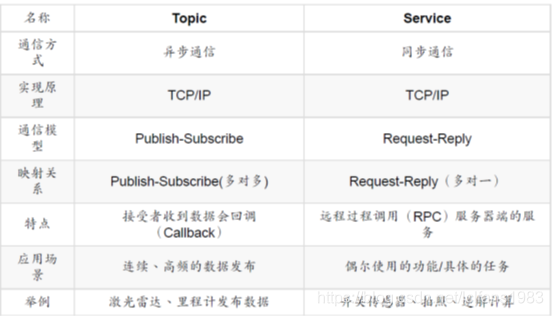
4.2.2.1 topic VS service
4.2.2.2 rosservice命令
- rosservice list 显示服务列表
- rosservice info 打印服务信息
- rosservice type 打印服务类型
- rosservice uri 打印服务ROSRPC uri
- rosservice find 按服务类型查找服务
- rosservice call 使用所提供的args调用服务
- rosservice args 打印服务参数
4.2.2.3 srv文件
srv文件是用来描述服务(service数据类型的,service通信的数据格式定义在*.srv中。它声明了一个服务,包括请求(request)和响应(reply)两部分。
其格式声明如下:举例:
msgs_demo/srv/DetectHuman.srv
bool start_detect
---
my_pkg/HumanPose[] pose_data
msgs_demo/msg/HumanPose.msg
std_msgs/Header header
string uuid
int32 number_of_joints
my_pkg/JointPose[]joint_data
msgs_demo/msg/JointPose.msg
string joint_name
geometry_msgs/Pose pose
floar32 confidence
srv文件格式很固定,第一行是请求的格式,中间用---隔开,第三行是应答的格式。在本例中,请求为是否开始检测,应答为一个数组,数组的每个元素为某个人的姿态(HumanPose)。而对于人的姿态,其实是一个msg,所以srv可以嵌套msg在其中,但它不能嵌套srv。
4.2.2.4 rossrv命令
- rossrv show 显示服务描述
- rossrv list 列出所有服务
- rossrv md5 显示服务md5sum
- rossrv package 列出包中的服务
- rossrv packages 列出包含服务的包
4.2.3 Parameter server
参数服务器(parameter server)也可以说是特殊的“通信方式”。特殊点在于参数服务器是节点存储参数的地方、用于配置参数,全局共享参数。参数服务器使用互联网传输,在节点管理器中运行,实现整个通信过程。
参数服务器,作为ROS中另外一种数据传输方式,有别于topic和service,它更加的静态。参数服务器维护着一个数据字典,字典里存储着各种参数和配置。
参数服务器的维护方式有三种:
- 命令行维护
- launch文件内读写
- node源码
4.2.3.1命令行维护:rosparam
- rosparam set param_key param_value 设置参数
- rosparam get param_key 显示参数
- rosparam load file_name 从文件加载参数
- rosparam dump file_name 保存参数到文件
- rosparam delete 删除参数
- rosparam list 列出参数名称
load&&dump文件
load和dump文件需要遵守YAML格式,YAML格式具体示例如下:
name:'Zhangsan'
age:20
gender:'M'
score{Chinese:80,Math:90}
score_history:[85,82,88,90]
4.2.3.2 launch文件内读写
launch文件中有很多标签,而与参数服务器相关的标签只有两个,一个是 <param> ,另一个
是 <rosparam> 。
4.2.3.3 node源码
ROS源码,也就是利用API来对参数服务器进行操作。具体内容我们学习完后面章节再进行介绍。
4.2.4 Action
Actionlib是ROS中一个很重要的库,类似service通信机制,actionlib也是一种请求响应机制的
通信方式,actionlib主要弥补了service通信的一个不足,就是当机器人执行一个长时间的任务
时,假如利用service通信方式,那么publisher会很长时间接受不到反馈的reply,致使通信受
阻。当service通信不能很好的完成任务时候,actionlib则可以比较适合实现长时间的通信过
程,actionlib通信过程可以随时被查看过程进度,也可以终止请求,这样的一个特性,使得它
在一些特别的机制中拥有很高的效率。
4.2.4.1 Action的工作原理
Action的工作原理是client-server模式,也是一个双向的通信模式。通信双方在ROS
Action Protocol下通过消息进行数据的交流通信。client和server为用户提供一个简单的
API来请求目标(在客户端)或通过函数调用和回调来执行目标(在服务器端)。
工作模式的结构示意图如下:
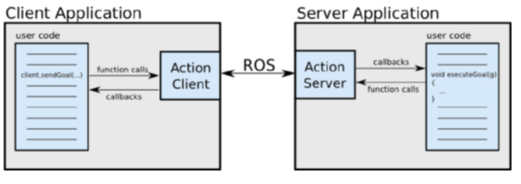
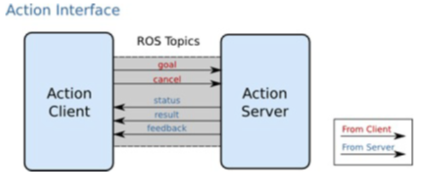
客户端会向服务器发送目标指令和取消动作指令,而服务器则可以给客户端发送实时的状态信息,结果信息,反馈信息等等,从而完成了service没法做到的部分.
4.2.4.2 action文件
利用动作库进行请求响应,动作的内容格式应包含三个部分,目标、反馈、结果。
- 目标
机器人执行一个动作,应该有明确的移动目标信息,包括一些参数的设定,方向、角度、速度等等。从而使机器人完成动作任务。
- 反馈
在动作进行的过程中,应该有实时的状态信息反馈给服务器的实施者,告诉实施者动作完成的状态,可以使实施者作出准确的判断去修正命令。
- 结果
当运动完成时,动作服务器把本次运动的结果数据发送给客户端,使客户端得到本次动作的全部信息,例如可能包含机器人的运动时长,最终姿势等等。
Action规范文件的后缀名是.action,它的内容格式如下:
# Define the goal
uint32 dishwasher_id # Specify which dishwasher we want to use
---
# Define the result
uint32 total_dishes_cleaned
---
# Define a feedback message
float32 percent_complete
转载地址:https://blog.csdn.net/lclfans1983/article/details/105398893 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
